
ECD1 ПИД-регулятор

ECD2 ПИД-регулятор 2х канальный

ECV1 ПИД-регулятор для КЗР

ECD8-L Измеритель-регулятор 8ми канальный c функцией архивирования

ECD4-L Измеритель-регулятор 4х канальный c функцией архивирования

EWM Преобразователи сигналов тенезодатчиков

ELV1 Регулятор уровня жидкости многофункциональный

ELV3 Сигнализатор уровня 3х канальный

ELV-POOL Регулятор уровня воды для переливных бассейнов

EPL1 Контроллер управления насосами

ETC Таймер реального времени

ELHART: TRE-C термосопротивление c кабелем

ИГЛЫ

PTE5000С Датчик давления ELHART

HTE.PF датчики влажности и температуры

VLS-C Вибрационный сигнализатор уровня компактного исполнения

CLS.C01: Подвесной кондуктометрический датчик уровня

CLS.H01: Стержневой кондуктометрический датчик уровня, аксессуары

ELS Электромагнитный датчик уровня
![]()
UDB: датчик контроля двойного листа
![]()
UDS.12: Ультразвуковые датчики расстояния
![]()
UDS.18: Ультразвуковой датчик расстояния
![]()
UDS.30: Ультразвуковой датчик расстояния

EMD-MINI Преобразователь частоты

EMD-PUMP Преобразователь частоты для насосов

EMD-VL, EMD-VH Преобразователь частоты векторный

DCC Дроссель постоянного тока

MC Моторный дроссель

EMD-MINI — RCP Выносной пульт управления для ПЧ ELHART серии EMD-MINI

EMD-PUMP — RCP Пульт управления для ПЧ ELHART серии EMD-PUMP

LC Сетевой дроссель

ECP Панели оператора

ELP Панели оператора

BakeControl — Система управления хлебопекарными печами

КАСКАД КНС — Шкафы управления для систем водоотведения

КАСКАД 10 — Шкафы управления насосом

КОНТУР — Шкафы управления ИТП (расширенная версия)

КОНТУР-С0 — Шкафы управления одним контуром ИТП (отопление или ГВС)

КОНТУР Lite — Шкафы управления ИТП (базовая версия)

LevelMaster — Шкафы управления для контроля уровня в емкостях

PoolMaster 10 — Шкафы управления бассейном

ClimatMaster — Шкафы управления вентиляцией

ESS1-DA-mini Однофазное миниатюрное ТТР (3-32 VDC)

ESS1-DA DHT Компактное ТТР на DIN-рейку (4-32 VDC)

ESS1-AA Однофазное ТТР (90-250 VAC)

ESS1-LA Однофазное ТТР (4-20мА) 0-380 VAC

ESS1-UA S Однофазное ТТР (0-10 VDC)

ESS3-DA Трехфазное ТТР (3-32 VDC)

ESS3-AA Трехфазное ТТР (90-250 VAC)

ESS1-DA Однофазное ТТР (3-32 VDC)

ESS1-DD Однофазное ТТР (5-32 VDC)

ESS1-PA Однофазное ТТР (0-470/560 кОм) 10-440 VAC

ESH1-DA Однофазное силовое ТТР (3-32 VDC)

ESH1-DAH Однофазное силовое реле до 1200VAC (3-32 VDC)

Радиаторы охлаждения для SSR ELHART
EMD-MINI – 004 S Преобразователь частоты ELHART (0,4кВт, 2,5А, 220В, встр. ПИД-регулятор, 4 дискр. входа (NPN), 1 дискр. выход (реле НО, 250В, 3А),1 аналоговый вход 4-20мА/0-10В, поворотный задатчик частоты, RS-485 Modbus RTU, монтаж на DIN-рейку), серия EMD-MINI
EMD-MINI – 004 T Преобразователь частоты ELHART (0,4кВт, 1,5А, 380В, встр. ПИД-регулятор, 4 дискр. входа (NPN), 1 дискр. выход (реле НО, 250В, 3А),1 аналоговый вход 4-20мА/0-10В, поворотный задатчик частоты, RS-485 Modbus RTU, монтаж на DIN-рейку), серия EMD-MINI
EMD-MINI – 007 S Преобразователь частоты ELHART (0,75кВт, 5А, 220В, встр. ПИД-регулятор, 4 дискр. входа (NPN), 1 дискр. выход (реле НО, 250В, 3А),1 аналоговый вход 4-20мА/0-10В, поворотный задатчик частоты, RS-485 Modbus RTU, монтаж на DIN-рейку), серия EMD-MINI
EMD-MINI – 007 T Преобразователь частоты ELHART (0,75кВт, 2,7А, 380В, встр. ПИД-регулятор, 4 дискр. входа (NPN), 1 дискр. выход (реле НО, 250В, 3А),1 аналоговый вход 4-20мА/0-10В, поворотный задатчик частоты, RS-485 Modbus RTU, монтаж на DIN-рейку), серия EMD-MINI
EMD-MINI – 015 S Преобразователь частоты ELHART (1,5кВт, 7А, 220В, встр. ПИД-регулятор, 4 дискр. входа (NPN), 1 дискр. выход (реле НО, 250В, 3А),1 аналоговый вход 4-20мА/0-10В, поворотный задатчик частоты, RS-485 Modbus RTU, монтаж на DIN-рейку), серия EMD-MINI
EMD-MINI – 015 T Преобразователь частоты ELHART (1,5кВт, 4А, 380В, встр. ПИД-регулятор, 4 дискр. входа (NPN), 1 дискр. выход (реле НО, 250В, 3А),1 аналоговый вход 4-20мА/0-10В, поворотный задатчик частоты, RS-485 Modbus RTU, монтаж на DIN-рейку), серия EMD-MINI
EMD-MINI – 022 S Преобразователь частоты ELHART (2,2кВт, 11А, 220В, встр. ПИД-регулятор, 4 дискр. входа (NPN), 1 дискр. выход (реле НО, 250В, 3А),1 аналоговый вход 4-20мА/0-10В, поворотный задатчик частоты, RS-485 Modbus RTU, монтаж на DIN-рейку), серия EMD-MINI
EMD-MINI – 022 T Преобразователь частоты ELHART (2,2 кВт, 5А, 380В, встр. ПИД-регулятор, 4 дискр. входа (NPN), 1 дискр. выход (реле НО, 250В, 3А),1 аналоговый вход 4-20мА/0-10В, поворотный задатчик частоты, RS-485 Modbus RTU, монтаж на DIN-рейку), серия EMD-MINI
EMD-MINI – 037 T Преобразователь частоты ELHART (3,7 кВт, 8,6А, 380В, встр. ПИД-регулятор, 4 дискр. входа (NPN), 1 дискр. выход (реле НО, 250В, 3А),1 аналоговый вход 4-20мА/0-10В, поворотный задатчик частоты, RS-485 Modbus RTU, монтаж на DIN-рейку), серия EMD-MINI
EMD-MINI – 055 T Преобразователь частоты ELHART (5,5 кВт, 12,5А, 380В, встр. ПИД-регулятор, 4 дискр. входа (NPN), 1 дискр. выход (реле НО, 250В, 3А),1 аналоговый вход 4-20мА/0-10В, поворотный задатчик частоты, RS-485 Modbus RTU, монтаж на DIN-рейку), серия EMD-MINI
EMD-MINI – 075 T Преобразователь частоты ELHART (7,5 кВт, 17,5А, 380В, встр. ПИД-регулятор, 4 дискр. входа (NPN), 1 дискр. выход (реле НО, 250В, 3А),1 аналоговый вход 4-20мА/0-10В, поворотный задатчик частоты, RS-485 Modbus RTU), серия EMD-MINI
EMD-MINI – 110 T Преобразователь частоты ELHART (11 кВт, 24А, 380В, встр. ПИД-регулятор, 4 дискр. входа (NPN), 1 дискр. выход (реле НО, 250В, 3А),1 аналоговый вход 4-20мА/0-10В, поворотный задатчик частоты, RS-485 Modbus RTU), серия EMD-MINI
Содержание
- Реализация управления пуском, остановом, реверсом и скоростью вращения ПЧ Elhart EMD-Mini с внешних кнопок / переключателей
- 1. Способы подачи сигналов управления на частотный преобразователь
- 2. Двухпроводная схема подключения ЧП с использованием контактов с фиксацией
- Режим 1
- Режим 2
- 3. Трехпроводная схема подключения ЧП с использованием контактов без фиксации
- Режим 1
- Режим 2
- 4. Задание частоты
- Задание частоты встроенными кнопками «Вверх/Вниз» (предустановленная выходная частота)
- Задание частоты командами «Больше/Меньше»
- 5. Устранение типовых неполадок в работе частотного преобразователя
Реализация управления пуском, остановом, реверсом и скоростью вращения ПЧ Elhart EMD-Mini с внешних кнопок / переключателей
1. Способы подачи сигналов управления на частотный преобразователь
Преобразователь частоты ELHART EMD-Mini имеет встроенную несъемную панель управления. С этой панели доступен весь функционал частотника (настройки, управление). По умолчанию частотный преобразователь настроен на управление двигателем со встроенной панели (кнопка RUN/STOP, встроенный потенциометр). Потенциометр настроен на регулировку частоты от 0 до 50 Гц (максимальной частоты).
 Рисунок 1 — Преобразователи частоты ELHART EMD-MINI
Рисунок 1 — Преобразователи частоты ELHART EMD-MINI
Управление частотным инвертором со встроенной панели имеет свои недостатки:
- Так как преобразователь предназначен для установки в шкаф управления, то для доступа к встроенной панели необходимо каждый раз открывать дверь шкафа (в случае работы в пыльном производстве — мука, пыль, цемент — частое открытие двери недопустимо). Кроме того, часто частотник устанавливается рядом с двигателем, а пульт оператора находится в стороне.
ПЧ ELHART позволяет настроить подачу команд управления со встроенной панели, интерфейса RS-485, а так же на программируемых дискретных входах, в этом материале речь пойдет именно о них.
Указания по монтажу сигналов управления к частотному преобразователю:
- Управляющий кабель должен быть размещен отдельно от кабелей силовой части.
- Применяйте для подключения к дискретным входам только высококачественные коммутационные элементы, исключающие дребезг контактов.
- Для предотвращения помех используйте экранированные провода с сечением 0,75 мм².
- Не подавайте внешнее напряжение на клеммы управляющих сигналов.
- Максимальная длина управляющих цепей 30 м.
В частотном инверторе EMD-MINI есть 4 программируемых дискретных входа FWD, REV, S1 и S2. Принципиальных отличий между входами нет, так как функции настроек для всех входов даны одинаковы. Для управления с дискретных входов необходимо использовать переключатели типа «сухой контакт» (кнопка, концевик, релейный выход). Если источник управления встроенная панель — пуск, останов, смена направления движения с дискретных входов невозможна. Если источник управления дискретные входы, пуск со встроенной панели невозможен.
Кнопку «Стоп» на панели частотника можно заблокировать (Р103=0 — кнопка заблокирована, Р103=1 — кнопка активна). По умолчанию кнопка активна. Возможно подключение кнопок управления по двухпроводной и трехпроводной схеме.
2. Двухпроводная схема подключения ЧП с использованием контактов с фиксацией
Режим 1
Таблица 1 — Работа ПЧ в режиме 1 (контакты с фиксацией)
| Состояние входных сигналов | Режим работы | |
|---|---|---|
| К1 | К2 | |
| Вкл | Выкл | Вращение в прямом направлении |
| Выкл | Вкл | Вращение в обратном направлении |
| Выкл | Выкл | Стоп |
| Вкл | Вкл | Стоп |
- Р102=1 — Источник команд управления = программируемые дискретные входы;
- Р315=6 — Вход FWD = вращение в прямом направлении;
- Р316=7 — Вход REV = вращение в обратном направлении.
В схеме можно применить переключатель «Джойстик» EMAS CP101DJ20 на 2 направления с фиксацией. (2НО). Среднее положение — стоп, или переключатель с фиксацией II-0-I EMAS B101S30
Режим 2
Таблица 2 — Работа ПЧ в режиме 2 (контакты с фиксацией)
| Состояние входных сигналов | Режим работы | |
|---|---|---|
| К1 | К2 | |
| Вкл | Выкл | Вращение в прямом направлении |
| Вкл | Вкл | Вращение в обратном направлении |
| Выкл | Выкл | Стоп |
| Выкл | Вкл | Стоп |
- Р102=1 — Источник команд управления = программируемые дискретные входы;
- Р315=6 — Вход FWD = вращение в прямом направлении;
- Р316=4 — Вход REV = изменение направления вращения.
В этой схеме пока замкнут контакт К1 двигатель вращается. Если К2 разомкнут — вращение происходит в прямом направлении, если К2 замкнут — в обратном. В схеме можно применить 2 переключателя с фиксацией 0-I, например, переключатель B100S20, B100C, или тумблер МА111.
3. Трехпроводная схема подключения ЧП с использованием контактов без фиксации
Режим 1
- Р102=1 — Источник команд управления = программируемые дискретные входы;
- Р315=8 — Вход FWD = сигнал «Стоп» (контакт НЗ);
- Р317=6 — Вход S1 = вращение в прямом направлении;
- Р318=7 — Вход S2 = вращение в обратном направлении.
В схеме могут быть применены 2 кнопки без фиксации B100DH для запуска вращения и кнопка красная с НЗ контактом, например, кнопка B200DK для остановки.
Также для запуска можно применить переключатель без фиксации II-0-I B101S32 или переключатель «Джойстик» CP101DJ21 на 2 направления без фиксации. Переключение влево — вращение в одну сторону, вправо — в другую.
Режим 2
- Р102=1 — Источник команд управления = программируемые дискретные входы;
- Р315=8 — Вход FWD = сигнал «Стоп» (контакт НЗ);
- Р317=5 — Вход S1 = команда «Пуск» (НО);
- Р318=4 — Вход S2 = изменение направления вращения (кнопка НО с фиксацией).
В схеме может быть применена сдвоенная кнопка пуск/стоп EMAS B102K20KY. Где НЗ
контакт К3 — «Стоп», НО контакт К1 — «Пуск», НО контакт К2 — «Реверс» (переключатель с фиксацией, например, B100S20).
Контакт К2 не запускает двигатель, а лишь меняет направление вращения (в замкнутом состоянии). Параметр Р104 позволяет запретить реверс (по умолчанию разрешен).
Преобразователь частоты имеет возможность производить автостарт после подачи питания. Для этого необходимо в параметре Р416 установить 1 (автостарт разрешен). Также необходимо обеспечить постоянную подачу сигнала «ПУСК». Установить P102=1, то есть источником сигнала «ПУСК» будет дискретный вход и использовать кнопку с фиксацией для подачи сигнала на дискретный вход. Дискретный вход, на который будет подан сигнал «ПУСК», должен иметь функцию «5» либо «6» (см. P315-P318). Для автоматического запуска частотный преобразователь должен быть полностью выключен (при кратковременном пропадании питания ПЧ выдаст ошибку «Lu3» и не запустится).
Преобразователь частоты имеет возможность защиты от изменения параметров неквалифицированным персоналом. Если P118 =1, то все параметры заблокированы, параметры не могут быть изменены за исключением P100 (предустановленная выходная частота).
4. Задание частоты
Задание частоты возможно со встроенного потенциометра, внешними кнопками (больше/меньше), внешним потенциометром, сигналами 0-10 В, 4-20 мА, кнопками (больше/меньше) со встроенной панели, через интерфейс RS-485. Для использования внешнего потенциометра необходимо в качестве источника задания выходной частоты выбрать аналоговый сигнал 0..10 В (Р101=1). Внешний потенциометр для частотных преобразователей используется номиналом 5 либо 10 кОм. Рекомендуется использовать потенциометр EMAS BPR05K или BPR10K.
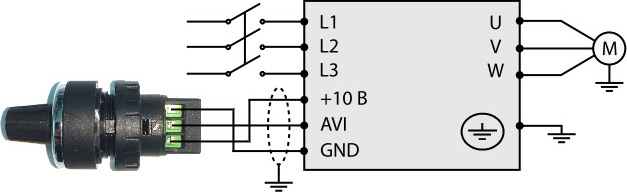 Рисунок 4 — Задание частоты сигналом 0. 10 В внешним потенциометром
Рисунок 4 — Задание частоты сигналом 0. 10 В внешним потенциометром
Подключая внешний потенциометр мы подаем на аналоговый вход сигнал от 0 до 10 В (потенциометр выступает в роли делителя напряжения). Если используется не весь диапазон частот (от 0 до Fmax), то можно настроить частоту при минимальном и максимальном сигнале потенциометра. Пример настройки на управление частотой в диапазоне 20-45 Гц (см. рис. 5).
 Рисунок 5 — График задания частоты
Рисунок 5 — График задания частоты
- Р310=20 (частота при минимальном сигнале);
- Р312=45 (частота при максимальном сигнале).
Также можно настроить на работу с прямым и обратным вращением двигателя. Пример настройки вращения от 25 Гц в одном направлении до 40 Гц в другом. При положении ручки потенциометра 0% двигатель вращается в обратном направлении на частоте 25 Гц. Пропорционально вращению ручки потенциометра двигатель замедляется, останавливается и начинает вращаться в прямом направлении. При положении ручки 100% достигается частота 40 Гц с вращением в прямом направлении (см. рис. 6).
 Рисунок 6 — График задания частоты
Рисунок 6 — График задания частоты
- Р310=25 (частота при минимальном сигнале);
- Р311=1 (направление вращения при минимальном сигнале = обратное);
- Р312=40 (частота при максимальном сигнале);
- Р314=1 (при аналоговом сигнале реверс разрешен).
Задание частоты встроенными кнопками «Вверх/Вниз» (предустановленная выходная частота)
Фиксированная частота используется в качестве задания выходной частоты, когда параметр P101=0. Во время работы ПЧ выходную частоту можно изменять кнопками «Вверх/Вниз» (расположенными на встроенной панели управления). После отключения питания значение частоты вернётся на значение в параметре P100, если P812=1. После отключения питания значение частоты заданной кнопками «Вверх/Вниз» сохраняется, если P812=0 (задано по умолчанию).
Задание частоты командами «Больше/Меньше»
Выходная частота задаётся сигналами «Вверх/Вниз», подключенными к программируемым дискретным входам (см. рис 7).
 Рисунок 7 — Задание частоты через дискретные входы (команды «Больше/Меньше»)
Рисунок 7 — Задание частоты через дискретные входы (команды «Больше/Меньше»)
Для конфигурации входов, необходимо изменить параметры:
- Р101=4 — источник задания выходной частоты = внешние кнопки «Вверх/Вниз»;
- P317=15 — вход S1 запрограммирован на сигнал «Вверх», то есть увеличение заданной частоты;
- P318=16 — вход S2 запрограммирован на сигнал «Вниз», то есть уменьшение заданной частоты.
При замыкании контакта «Вверх» происходит увеличение заданной частоты, при замыкании контакта «Вниз» происходит уменьшение заданной частоты. Для сохранения заданной частоты после отключения питания необходимо установить соответствующий параметр P812=0 (установлен по умолчанию) (см. рис. 8).
 Рисунок 8 — Задание частоты командами «Больше/Меньше»
Рисунок 8 — Задание частоты командами «Больше/Меньше»
Выносной пульт EMD-Mini RCP имеет абсолютно те же функции и возможности, что и панель управления на самом частотнике.
 Пульт ELHART EMD-Mini RCP
Пульт ELHART EMD-Mini RCP
При подключении пульта EMD-Mini RCP показания на встроенной панели и внешнем пульте дублируются (отображаются синхронно). При этом кнопки и потенциометр на встроенной панели не активны. Управление и настройки происходят только с внешнего пульта.
Пульт ELHART EMD-Mini P318=16 — вход S2 запрограммирован на сигнал «Вниз», то есть уменьшение заданной частоты
Сводная таблица — сравнения способов управления преобразователем частоты
| Способ управления | Преимущества | Недостатки |
|---|---|---|
| Со встроенной панели |
|
|
| С пульта EMD-Mini RCP |
|
|
| С внешних кнопок/переключателей, потенциометра |
|
|
5. Устранение типовых неполадок в работе частотного преобразователя
Если причины возникновения неполадки не известны, то рекомендуется произвести сброс параметров на заводские значения Р117=8 и провести настройку преобразователя частоты еще раз.
Устранение типовых неполадок в работе
| Неполадка | Причина и способ устранения |
|---|---|
| Параметр не может быть изменен |
|
| Электродвигатель не начинает вращение при подаче команды «ПУСК» |
|
| Двигатель не работает в режиме вращения в обратном направлении |
|
| Двигатель работает в режиме вращения в обратном направлении |
|
Инженер ООО «КИП-Сервис»
Рыбчинский М.Ю.
Источник
Главная
/
Каталог товаров
/
/
/
/
/
EMD-MINI – 015 T Преобразователь частоты ELHART (1,5кВт, 4А, 380В, встр. ПИД-регулятор, 4 дискр. входа (NPN), 1 дискр. выход (реле НО, 250В, 3А),1 аналоговый вход 4-20мА/0-10В, поворотный задатчик частоты, RS-485 Modbus RTU, монтаж на DIN-рейку), серия EM
, 1 дискр. выход (реле НО, 250В, 3А),1 аналоговый вход 4-20мА/0-10В, поворотный задатчик частоты, RS-485 Modbus RTU, монтаж на DIN-рейку), серия EM")
EMD-MINI – 015 T Преобразователь частоты ELHART (1,5кВт, 4А, 380В, встр. ПИД-регулятор, 4 дискр. входа (NPN), 1 дискр. выход (реле НО, 250В, 3А),1 аналоговый вход 4-20мА/0-10В, поворотный задатчик частоты, RS-485 Modbus RTU, монтаж на DIN-рейку), серия EM
EMD-MINI – 015 T Преобразователь частоты ELHART (1,5кВт, 4А, 380В, встр. ПИД-регулятор, 4 дискр. входа (NPN), 1 дискр. выход (реле НО, 250В, 3А),1 аналоговый вход 4-20мА/0-10В, поворотный задатчик частоты, RS-485 Modbus RTU, монтаж на DIN-рейку), серия EM
Удобство и простота эксплуатации
- Наличие встроенного интерфейса RS-485 дает возможность осуществлять удаленное управление частотно-регулируемым электроприводом.
- Возможность подключения выносного пульта управления EMD‑MINI – RCP (не входит в комплект поставки) позволяет реализовать дистанционное управление на расстоянии до 2 метров.
- Компактный размер позволяет установить частотный преобразователь на DIN-рейку. Крепление к DIN-рейке предусмотрено конструкцией.
- Простое и быстрое программирование параметров настройки.
- Встроенный блок питания 10 В постоянного тока для подключения внешнего потенциометра.
- Высокая производительность
- Вольт-частотное (скалярное) управление асинхронным электродвигателем — сохранение постоянства соотношения V/f для обеспечения постоянства величины магнитного поля при различных скоростях.
- Перегрузочная способность 150% номинального тока в течение 60 секунд.
- Выходная частота до 999,9 Гц позволяет реализовать управление высокочастотными электродвигателями.
Функциональность
- Встроенный ПИД-регулятор позволяет непрерывно контролировать параметры технологического процесса (давление, расход, температура и т. д.).
- Спящий режим при работе частотного преобразователя в режиме ПИД-регулирования позволяет экономить потребляемую электроэнергию и сократить износ оборудования.
- Программный режим для задания скорости и направления вращения электродвигателя по заранее заданной программе (до 15 шагов).
- Корректировка вольт-частотной характеристики V/f по трем точкам для адаптации управления под характер нагрузки электродвигателя.
Артикул EMD‑MINI — 015 T
Габаритные размеры, мм
| W | H | D | A | B | E | Ød | Масса |
Крепление на DIN-рейку 35 мм |
| 85 | 180 | 116 | 167 | 72 | 100 | 5,5 | 0,93 |
|
Отзывов ещё нет – ваш может стать первым
Нужна консультация?
Сомневаетесь, подойдет ли вам этот товар?
Существует несколько способов управления частотным преобразователем. В процессе работы ПЧ происходит оперативный контроль следующих функций:
Пуск – Останов
(Старт – Стоп). Управление началом вращения и торможением подключенного двигателя.
Установка скорости.
Настройка рабочей скорости привода.
Аварийный останов.
Аварийное снятие силового питания, сигнал разрешения работы.
Эти изменения в работе ПЧ производятся путем подачи сигналов с внешних устройств либо с панели управления. Остальными параметрами можно управлять исключительно с панели управления, причем некоторые из них активны только при выключенном двигателе.
Способы управления могут быть следующими
:
- управление с помощью клавиатуры (панели управления) частотного преобразователя
- управление с помощью пульта ДУ
- аналоговый вход (изменение текущей скорости вращения двигателя)
- дискретные входы (изменение различных состояний и параметров преобразователя)
- последовательный интерфейс RS-485 либо его аналог
Рассмотрим управление преобразователем на примере ПЧ Prostar PR6000.
Управление через аналоговый вход
В преобразователе частоты PR6000 имеется два аналоговых входа – AI1 и AI2. Это выгодно отличает его от других моделей с одним аналоговым входом.

Вход AI1 может использоваться для управления по напряжению с входным сопротивлением 47 кОм. Вход AI2 имеет выбор, который производится переключателем: токовый вход с входным сопротивлением 500 Ом, или вход по напряжению.
Неправильные сети. Несогласованная сеть.
Сравним формулировку данных от неправильной сети разработанной системы. Она была измерена в точках А и В. Здесь на краях пары резисторов для согласования. Сигнал идет от источника, сталкивается с цепью на кабеле. Это ведет к разрушению импедансов, отражению. В открытой цепи энергия идет назад, вызывает искажение сигнала.

Рис. 8. Сеть несогласована. Форма сигнала отличается от правильной.
Расположение терминатора неправильное.
Резистор согласованный есть, но размещен отлично от другого конца кабеля. Сигнал сталкивается с импедансом и его рассогласованием, соединяется на резисторе. Сопротивление было согласовано с кабельным сопротивлением. Дополнительный кабель дает рассогласование и отражает экран. Другое рассогласование – это другой конец кабеля.

Рис. 9. Сеть с резистором, который размещен неправильно, его сигнал.
Управление через дискретные входы
У преобразователя PR6000 имеется 8 дискретных (цифровых) входов: FWD (вперед/стоп), REW (назад/стоп) и 6 входов DI1…DI6.
Входы FWD и REW могут работать в двух- и трехпроводном режиме, при этом третий провод программируется на одном из входов DI1…DI6. Выбор режима управления скоростью устанавливается в параметре Р077.
Дискретные входы DI1…DI6 являются многофункциональными, они программируются на разные функции, которые запускаются при активации соответствующего входа.
Набор возможных функций: выбор многоскоростного режима, выбор разгона/замедления, включение вращения в режиме JOG вперед/назад, управление остановом, увеличение/уменьшение частоты, вход сигнализации неисправности (аварии), пауза при пуске, трехпроводное управление пуском/стопом, торможение постоянным током, сброс ошибки/сообщения, работа по качающейся частоте, включение/сброс/вход счетчика. Всего можно выбрать до 20 различных параметров, которые устанавливаются в параметрах Р071…Р076 для каждого входа. Активация дискретных входов происходит путем замыкания нужного входа на клемму СОМ. Причем, это может производиться разными способами — выходом контроллера, контактами реле, датчика или ручной кнопки. Дискретные и аналоговые входы показаны ниже.

Управление через последовательный интерфейс
При работе через интерфейс RS-485 преобразователь частоты управляется контроллером либо персональным компьютером через специальный адаптер-преобразователь RS-485/RS-232.

Через этот интерфейс преобразователь может не только принимать команды на изменения параметров и состояния, но и выдавать информацию о своем текущем состоянии на другие устройства. Также по интерфейсу RS-485 может поддерживаться связь с другими преобразователями.
Далее поговорим о способах оперативного управления режимами ПЧ.
Применение частотного преобразователя
Применение частотных преобразователей позволило успешно реализовать эффективные системы регулирования скорости нижеприведенных объектов:
- насосы горячей/холодной воды в системах тепло- и водоснабжения;
- вспомогательные агрегаты котельных, ТЭС, ТЭЦ и котлоагрегатов;
- дробилки, мельницы, экструдеры и мешалки;
- различные песковые и пульповые насосы обогатительных фабрик;
- лифтовые установки;
- центрифуги разных типов;
- производственные линии картона, пленки и прочих ленточных материалов;
- крановое и эскалаторное оборудование;
- механизмы силовых манипуляторов;
- приводы буровых станков, специализированного оборудования и т.д.
В начале статьи уже было рассмотрено, для чего нужен частотный преобразователь, а на данном этапе освещения вопроса остается подчеркнуть, что этот тип оборудования позволяет получить существенный экономический эффект:
- экономия до 50% электроэнергии в агрегатах путем поддержания двигателя в режиме оптимального КПД;
- увеличение объема и оптимизация качества выпускаемой продукции;
- повышение уровня производительности производственного оборудования;
- снижение степени износа механических звеньев;
- продление срока эксплуатации технологического оборудования, коммутационной аппаратуры.
В конечном итоге, назначение преобразователя частоты – это обеспечение максимально эффективной и продуктивной работы оборудования со всеми вытекающими положительными аспектами.
Старт/Стоп двигателя
Запуск и останов двигателя может производиться следующими способами.
- С панели управления преобразователя частоты. Для этого используются кнопки RUN, STOP/RESET. Если нужен кратковременный запуск, используется кнопка JOG.
- Подачей сигнала на дискретные входы FWD, REW при двухпроводном управлении. Для трехпроводного управления нужно задействовать один из дискретных входов DI1…DI6 и запрограммировать его соответствующим образом. Режим выбирается параметром Р077. Любой из этих входов можно также использовать для импульсного запуска (команда JOG). При двухпроводном управлении для работы двигателя необходим постоянный сигнал на соответствующих входах. При трехпроводном достаточно кратковременного сигнала.
- Через последовательный интерфейс командами с контроллера. Выбор источника команды Старт/Стоп в ПЧ Prostar PR6000 производится в параметре Р006.
Двухпроводное управление пуском/остановом

Трехпроводное управление пуском/остановом

Удлиненные ответвители.
Кабель согласован, нагружен передатчик на витую пару одну. Проводной сегмент в точке подключения приемника слишком длинный. Большие ответвители оказывают большое рассогласование импеданса и отражают сигнал. Ответвители делают наименьшей длины.

Рис. 11. Сеть с трехметровым ответвителем и сигнал в итоге в сравнении с сигналом с маленьким ответвителем.
Управление частотой
ПЧ может управлять скоростью несколькими способами в зависимости от конкретного оборудования.
- Управление скоростью при помощи переменного резистора, установленного на клавиатуре (панели управления) ПЧ.
- Дискретное изменение при помощи клавиш панели управления Вверх/Вниз.
- Дискретное изменение при помощи контактов (любых двух), подключенных ко входам DI1…DI6. При активации соответствующего дискретного входа происходит уменьшение либо увеличение скорости в заданных пределах с заданным шагом. Примечание. В вариантах 2 и 3 при включении питания двигатель запускается на частоту, установленную в параметре Р005. В процессе работы частоту можно оперативно изменять. Если измененное значение частоты необходимо запомнить, используется параметр Р155.
- Задание скорости при помощи аналоговых сигналов напряжения или тока, поступающих на входы AI1, AI2. Аналоговые сигналы могут комбинироваться в разных вариантах.
- Задание в соответствии с частотой импульсов на входе DI6.
- Через интерфейс RS-485 от контроллера. Выбор канала управления частотой осуществляется параметром Р004. Верхняя и нижняя рабочие частоты устанавливаются в параметрах Р009 и Р010. Скорость работы двигателя в импульсном (толчковом) режиме JOG задается параметром Р052.
Способы контроля
Многие люди, работающие в сфере автоматизации, но не сталкивающиеся вплотную с процессами разработки и внедрения систем электроприводов полагают, что управление электродвигателем состоит из последовательности команд, вводимых с помощью интерфейса от пульта управления или ПК. Да, с точки зрения общей иерархии управления автоматизированной системой это правильно, однако есть еще способы управления самим электродвигателем. Именно эти способы и будут оказывать максимальное влияние на производительность всей системы.
Для асинхронных электродвигателей, подключенных к преобразователю частоты, существует четыре основных способа управления:
- U/f – вольт на герц;
- U/f с энкодером;
- Векторное управление с разомкнутым контуром;
- Векторное управление с замкнутым контуром;
Все четыре метода используют широтно-импульсную модуляцию ШИМ, которая изменяет ширину фиксированного сигнала путем изменения длительности импульсов для создания аналогового сигнала.
Широтно-импульсная модуляция применяется к преобразователю частоты путем использования фиксированного напряжения шины постоянного тока. Транзисторы с изолированным затвором (IGBT) путем быстрого открытия и закрытия (правильней сказать коммутации) генерируют выходные импульсы. Варьируя ширину этих импульсов на выходе получают «синусоиду» нужной частоты. Даже если форма выходного напряжения транзисторов импульсная, то ток все равно получается в виде синусоиды, так как электродвигатель имеет индуктивность, которая влияет на форму тока. Все методы управления основываются на ШИМ модуляции. Разница между методами управления заключается лишь в методе вычисления подаваемого напряжения на электродвигатель.
![]()
В данном случае несущая частота (показана красным) представляет собой максимальную частоту коммутации транзисторов. Несущая частота для инверторов, как правило, лежит в пределах 2 кГц – 15 кГц. Опорная частота (показана синим) представляет собой сигнал задания выходной частоты. Для инверторов применимых в обычных системах электроприводов, как правило, лежит в пределах 0 Гц – 60 Гц. При накладывании сигналов двух частот друг на друга, будет выдаваться сигнал открывания транзистора (обозначен черным цветом), который подводит силовое напряжение к электродвигателю.
Аварийный останов ПЧ
Кроме штатного останова функцией Стоп с заданным замедлением используются два способа экстренного останова двигателя и отключения ПЧ.
- Аварийный останов прерыванием питания. Для этого производители рекомендуют перед силовым питанием ПЧ устанавливать трехфазный линейный контактор, питание катушки которого зависит от состояния аварийной цепи всего оборудования. При нажатии на кнопку «Аварийный останов» или другом экстренном случае питание контактора отключается, и напряжение с ПЧ снимается. Таким образом двигатель гарантированно остановится.
- Используется функция дискретного входа DI1…DI6 «Сигнализация неисправности внешнего устройства». Если запрограммировать нужный вход на эту функцию, в случае подачи на него аварийного сигнала преобразователь остановится.
Другие полезные материалы:
Тонкости настройки преобразователя частоты FAQ по электродвигателям Настройка преобразователя частоты для работы на несколько двигателей Назначение и виды энкодеров
Кабели составные.
Проблема состоит в драйверах, которые разработаны чтобы управлять одной витой парой. Не любой передатчик может управлять 4-мя витыми параллельными парами. Уровни логические минимальные не гарантируются. Вместе с большой нагрузкой есть различие импедансов в месте, где соединены кабели. Различие импедансов значит отражение и искажение сигнала.

Рис. 10. Некорректная сеть с несколькими парами.
( 1 оценка, среднее 4 из 5 )