Утвержден
НТ598.00.00.000РЭ-ЛУ
КОМПЛЕКС МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ
Руководство по эксплуатации
НТ598.00.00.000 РЭ
Содержание
1 Введение ……………………………………………….……….………5
2 Описание и работа ..…..…………………………….….………………6
2.1 Описание и работа МРК …………………………..………….…..……6
2.1.1 Назначение МРК….. ……………………………………..…….………6
2.1.2 Состав изделия и комплект поставки ……………………..…….……7
2.1.3 Устройство МРК…. …………………………………………..……….8
2.1.4 Работа МРК…. ………………………………………………….…… 12
2.1.5 Маркировка и пломбирование ………………………………………15
2.1.6 Комплект упаковки и комплект ЗИП………………………………………… 15
2.2 Описание и работа составных частей изделия …………………….. 17
2.2.1 Мобильный робот ……………………………………………..….…. 17
2.2.1.1 Транспортное средство ……………………………………………… 17
2.2.1.2 Манипулятор …………………………………………………………..20
2.2.1.3 Бортовая система дистанционного управления …………………….23
2.2.1.4 Телевизионная система ……………………………………………….25
2.2.1.4.1 Обзорная телевизионная установка ОТУ1………………………….26
2.2.1.4.2 Обзорная телевизионная установка ОТУ2………………………….27
2.2.1.4.3 Телекамера ТК1……….………………………………………………28
2.2.1.4.4 Телекамеры ТК2 и ТК6 ……….………………………………… 29
2.2.1.4.5 Механизм наведения двухстепенной ……………………………….29
2.2.1.4.6 Телекамера ТК3……………………………………………………….30
2.2.1.4.7 Телекамера ТК5……………………………………………………….30
2.2.1.5 Автономный источник питания ……………………….……………31
2.2.2 Пост дистанционного управления ……………………….….………32
2.2.2.1 Пульт управления …………………………………………………….32
2.2.2.2 Стойка с антеннами ………………………………………………….44
2.2.2.3 Автономные источники питания ………………………………………….44
2.2.3 Дополнительное оборудование …………………………………….…… 45
2.2.3.1 Зарядное устройство …………………………………………………….. 45
2.2.3.2 Технологический пульт управления с кабелем …………………………47
2.2.3.3 Комплект сменных губок схвата ……………………………….………..47
2.2.4 Комплект ЗИП одиночный …………………………………………………49
3 Использование по назначению ……………………………………..……50
3.1 Эксплуатационные ограничения …………………………………….….50
3.2 Указания мер безопасности ………………………………………….…..52
3.3 Подготовка МРК к работе ………………………………………………..52
3.3.1 Развертывание МРК………………………………………………………………..52
3.3.2 Объем и последовательность внешнего осмотра …………………………54
3.3.3 Подготовка МР к использованию ………………………………………..54
3.3.4. Подготовка ПУ к использованию ……………………………………… 55
3.3.5 Порядок включения МРК ………………………………………………..56
3.3.5.1 Порядок включения МРК при управлении по кабелю ……………… 57
3.3.5.2 Порядок включения МРК при управлении по радио……………………..58
3.3.6 Проверка на функционирование ……………………………………….59
3.4 Использование МРК….. …………………………………………………61
3.4.1 Типовые режимы работы МРК ……………………………………….….61
3.4.1.1 Управление транспортным средством………………………………….61
3.4.1.2 Управление телевизионной системой …………………………….… 63
3.4.1.3 Погрузочно-разгрузочные работы с помощью манипулятора…………64
3.4.1.4 Транспортирование грузов и проведение специальных работ……….65
3.4.1.5 Проведение разведывательных работ………………………….…………65
3.4.1.6 Работа МРК при управлении по кабелю …….…………………..….… 66
3.4.2 Порядок работы с дополнительным оборудованием…………………. 66
3.4.2.1 Работа с комплектом сменных губок………………………….….….…..66
3.4.2.2 Работа с зарядными устройствами…………………………….….….…..67
3.4.2.3 Работа с технологическим пультом управления…………………..……68
3.4.2.4 Работа с установкой пожаротушения тонкораспыленной водой .……69
3.4.2.5 Работа с модулем водопенного пожаротушения ……………………… 71
3.4.2.6 Работа с модулем порошкового пожаротушения ………………………72
3.4.2.7 Работа с пеногенератором ………………………… ………………………73
3.4.3 Возможные неисправности и способы их устранения……….….….……75
3.4.4 Порядок выключения МРК…………………………………….…………. 76
4 Техническое обслуживание изделия……………………..…….……..…. 77
4.1 Общие указания…………………………………………….…….…..……77
4.2 Меры безопасности……………………………………………..…….……77
4.3 Порядок и виды технического обслуживания МРК….…….….….…….78
4.3.1 Ежедневное техническое обслуживание…………………… ..…………79
4.3.2 Контрольный осмотр…………………………………….……….….……80
4.3.3 Техническое обслуживание при хранении…………………….….…… 80
4.4 Проверка работоспособности МРК………………………….………….. 80
4.5 Консервация (расконсервация, переконсервация )………………….…. 80
4.5.1 Расконсервация……………………………………………………….…… 80
4.5.2 Консервация (переконсервация)…………………………………………..81
4.6 Перечень основных и дублирующих ГСМ, применяемых в изделии… 81
5 Хранение…………………………………………………………………. 82
6 Транспортирование………………………………………………………. 83
7 Гарантийные обязательства……………………………….…………….. 84
ВведениеНастоящее руководство по эксплуатации (РЭ) предназначено для изучения устройства и правил эксплуатации, технического обслуживания, текущего ремонта, хранения и транспортирования мобильного робототехнического комплекса разведки и пожаротушения НТ598.00.00.000 (МРК-РП.00.00.000), соблюдение которых обеспечивает поддержание комплекса в постоянной готовности к действию.
Руководство предназначено для обслуживающего персонала, прошедшего подготовку в специальном учебном центре и имеющего удостоверение на право управления и работы с изделием НТ598.00.00.000 (МРК-РП.00.00.000).
Руководство содержит описание устройства, порядок и правила подготовки изделия к использованию по назначению.
В настоящем РЭ приняты следующие обозначения и сокращения:
АИП – автономный источник питания;
ЗУ – зарядное устройство;
КК – комплект кабельный;
КЛУ – кабельная линия управления;
МН – механизм наведения;
МП – манипулятор;
МР – мобильный робот;
МРК –мобильный робототехнический комплекс;
ОПУ – опорно-поворотное устройство;
ОТУ – обзорная телевизионная установка;
ПДУ – пост дистанционного управления;
ПУ – пульт управления;
СДУ – система дистанционного управления;
ТК – телевизионная камера;
ТС – транспортное средство.
Описание и работа Описание и работа МРК
Назначение МРК
Мобильный робототехнический комплекс разведки и пожаротушения НТ598.00.00.000 (далее МРК), предназначен для применения при ликвидации последствий аварий, отягощенных химическим и радиационным загрязнением, сопряженных с рисками гибели и травматизма личного состава.
Технические характеристики изделияМасса снаряженного МР, не более кг 190
Максимальная скорость передвижения МР, не менее, км/ч 3,0
Высота преодолеваемого МР порогового препятствия, м 0.25
Допустимый угол крена, дифферента МР, не более, градус 35
Глубина преодолеваемой МР водной преграды, не более, м 0.1
Глубина преодолеваемого МР снежного покрова, не более, м 0.1
Номинальная грузоподъемность манипулятора, кг 30
Предельно допустимая грузоподъемность манипулятора, кг 50
Управление МР с ПУ на расстоянии:
по кабелю, м, до
по радио на открытой местности, м, до 200
1000
Габаритные размеры МР, не более, м Длина 1.35
Ширина 0.65
Высота 0.7
Время непрерывной работы, ч, не менее 4
Состав изделия и комплект поставкиВ состав изделия входят механизмы, устройства и приспособления, перечисленные в таблице 1.
Таблица 1
Наименование Обозначение Количество Заводской номер Примечание
1. Мобильный робот МРК-МВТ.10.00.000 1 2. Пульт управления (ПУ) 38-СМ221.02.00.00.00 1 3. Антенна ДУ 1 4. Антенна ТВ 1 5. Штатив 1 6. Комплект кабелей: — кабель питания пульта (1м); 1 — кабель ДУ (1 м); 1 — кабель ДУ (2 м); 1 — кабель ТВ (1 м); 1 — кабель ТВ (2 м); 1 — кабель катушки кабельной (1 м); 1 — кабель «Оружие». 1 7. Клапанный блок НТ598.93.01.000 1 8. Технологический пульт МРК-МВТ.96.00.000 1 9. Кабельная катушка МРК-МВТ.31.00.000 1 10. Комплект сменных
губок схвата:
— удлиненные
— грейферные
— для захвата цилиндрических предметов 2
2
2
11. Блок питания ПУ MP 822 1 12. Зарядное устройство блока питания ПУ Орион PW 320 1 13. Зарядное устройство МР Орион PW 320 2 14. ЗИП 1 15. Комплект эксплутационной документации:
-паспорт НТ598.00.00.00.000ПС
-руководство по эксплуатации
НТ598.00.00.00.000РЭ
-ведомость ЗИП
НТ598.00.00.00.000ЗИ 1
1
1
1 Изделие поставляется заказчику в соответствии с комплектацией, указанной в таблице 2.
Таблица 2
Наименование Обозначение Количество Примечание
1. Мобильный робототехнический комплекс
2. Комплект эксплуатационной
документации (папка):
2.1. Паспорт
2.2. Руководство по эксплуатации
2.3. Ведомость ЗИП НТ598.00.00.000
НТ598.00.00.000 ПС
НТ598.00.00.000 РЭ
НТ598.00.00.000 ЗИ
1
1
1
1
1
В соответствии с таблицей 1
Устройство МРК
Мобильный робототехнический комплекс представляет собой набор механизмов, устройств и приспособлений, предназначенных для выполнения оперативно-тактических задач, указанных в подразделе 2.1.1 настоящего РЭ.
Основным элементом МРК является мобильный робот (МР), общий вид которого представлен на рисунке 1. МР представляет собой транспортное средство (поз. 1), внутри корпуса которого размещены: отсек управления с блоками системы управления, бортовая часть канала связи (закрыт крышкой поз. 2) и система энергообеспечения — отсек аккумуляторный (закрыт крышкой поз. 3). На корпусе транспортного средства монтируется манипулятор (поз. 4) и сменное технологическое оборудование, подключаемое к МР на панелях управления (поз. 5).
МР оснащен телевизионной системой, системой освещения и каналом акустической связи.
Все исполнительные механизмы – электромеханического типа с двигателями постоянного тока.
МР управляется в командном режиме с поста дистанционного управления (рисунок 15).
8
15
14
3
13
11
12
10
9
6
5
7
241
Рисунок 1
Система дистанционного управления предназначена для дистанционного управления исполнительными механизмами и устройствами, входящими в состав МРК. Управление МР осуществляется по радиоканалу или кабелю в зависимости от условий работы.
Конструктивно СДУ делится на пультовую и бортовую части.
Пультовая часть СДУ, расположенная в ПУ, предназначена для задания команд управления, формирования командных посылок и преобразования их в код, удобный для передачи по кабелю и радиолинии. Задание команд управления осуществляется с помощью ручек управления, переключателей и кнопок, расположенных на панели управления (рисунок 19).
Бортовая часть СДУ, расположенная в корпусе транспортного средства МР (рисунок 2), предназначена для приема сигналов управления, поступающих, в зависимости от режима работы, по радиолинии или по кабелю, их обработки, усилению и распределению по соответствующим исполнительным устройствам и механизмам.
4
5 2 1
3
Рисунок 2
Для работы в условиях сложных для прохождения радиоволн (работа в зоне радиотени или работа с постановщиком радиопомех) СДУ снабжена бортовой катушкой с кабелем дистанционного управления, которая устанавливается на стойке в задней части МР (рисунок 12).
Для визуального контроля за работой МР МРК оснащен телевизионной системой (поз. 6, 7, 8, 9 рисунок 1).
Телевизионная система включает в себя:
— две обзорные телеустановки (ОТУ1, ОТУ2), выполняющие функции наблюдения за окружающей обстановкой;
— одну курсовую ТВ-камеру (ТК5), выполняющую функции наблюдения за дорогой в непосредственной близости от мобильного робота и положением гусениц по отношению к проезжей части дороги и их состоянием;
— одну прицельную ТВ-камеру (ТК3), позволяющую вести наблюдение за работой схвата и наведением рабочего инструмента на исследуемые предметы.
Все обзорные ТВ-камеры(ТК1, ТК2, ТК6), входящие в телеустановки ОТУ1 и ОТУ2,– цветные с широкоугольным объективом. Выводят изображение с четкостью не менее 380 ТВ-линий. Одна обзорная камера (ТК1) снабжена трансфокатором, позволяющим производить приближение (увеличение) изображения.
Обзорные ТВ-камеры (ТК1, ТК2, ТК6) установлены на двухстепенные механизмы наведения, позволяющие вести практически круговое наблюдение. Механизмы наведения ОТУ1 и ОТУ2 одинаковые, обеспечивают плавное пропорциональное (в зависимости от угла отклонения джойстика на пульте управления) изменение скорости наведения ТВ-камер – в вертикальной и горизонтальной плоскостях.
Максимальная скорость наведения ТВ-камер (ТК1, ТК2, ТК6) по горизонту и вертикали составляет 10º/с.
Курсовая ТВ-камера (ТК5) – цветная с широкоугольным объективом без трансфокатора, жестко установлена в передней части мобильного робота.
Прицельная ТВ-камера (ТК3)– цветного изображения без трансфокатора, жестко установлена на кисти мобильного робота.
Конструктивно телевизионная система состоит из бортовой, пультовой частей и комплекта антенно-фидерного устройства.
В бортовую часть телевизионной системы (рисунок 1) входят:
— телевизионная камера (поз. 7) (курсовая), установленная на передней части основания ОПУ манипулятора, постоянно ориентированная на переднюю часть гусениц;
— телевизионная камера (поз.  (прицельная), установленная на кисти, постоянно ориентированная на схват;
(прицельная), установленная на кисти, постоянно ориентированная на схват;
— обзорная телевизионная установка ОТУ1 (поз. 9), установленная на вращающейся части опорно-поворотного устройства манипулятора.
— обзорная телевизионная установка ОТУ2 (поз. 6), установленная на вращающейся части опорно-поворотного устройства манипулятора;
— приемник команд управления по радио (общий для системы управления и телевизионной системы);
— блок управления механизмами наведения и телеметрии;
— передатчик телевизионных сигналов;
— антенно-фидерное устройство (для передачи телевизионного сигнала и телеметрии).
В пультовую часть телевизионной системы входят:
— антенно-фидерное устройство;
— передатчик команд управления по радио;
— приемник телевизионных сигналов;
— панель управления;
— формирователь команд управления;
— цветной монитор.
Управление телевизионной системой осуществляется дистанционно с ПУ, а визуальная информация о работе МР отображается на мониторе ПУ.
Дополнительно МР может оснащаться:
— светозвуковой сигнализацией предназначенной для оповещения места нахождения МР;
— приборами радиационной и химической разведки;
— дополнительным технологическим оборудованием и инструментом.
Функциональная схема СДУ МРК представлена на рисунке 3.
Работа МРК
Работу МР и ПУ, рассмотрим по функциональной схеме (рисунок 3).
Управление МР осуществляет оператор с ПУ поста дистанционного управления. Возможно управление, как по кабельной линии связи, так и по радио. Режим управления – командный.
Команды управления задаются оператором на ПУ ПДУ путем нажатия на соответствующие ручки, тумблеры, кнопки и переключатели на панели управления.
Сигналы пропорционального управления поступают в канал управления пульта на аналого-цифровой преобразователь, который преобразует их в цифровой код.
Команды дискретного управления поступают на микропроцессорный модуль пультовой части канала дистанционного управления, который формирует командные посылки в цифровом виде, удобном для передачи по кабельной линии связи и по радио.
В зависимости от режима работы МРК «Радио» или «Кабель» цифровой сигнал управления поступает на радиопередатчик канала дистанционного управления (радиомодем) или в кабельный канал связи соответственно.
В зависимости от режима работы «Радио» или «Кабель» на микропроцессор бортовой части канала дистанционного управления поступают цифровые сигналы управления от радио приемника или с примника-передатчика по витой паре. Сигналы управления, прежде чем поступить на соответствующие объекты управления (двигатели транспортного средства, манипулятор, фары, коммутатор телевизионных сигналов, дополнительное оборудование), поступают на блоки управления по шине CAN, где происходит соответствующее усиление сигналов по напряжению и по току.
Необходимую информацию для выполнения работ оператор получает с помощью телевизионной системы, канала акустической связи и дополнительно устанавливаемых на борту МР датчиков (в комплект МРК не входят). Видеоизображение в виде электрического видеосигнала от пяти телекамер поступает на коммутатор телевизионных сигналов, расположенный в блоке управления телевидением бортовой части СДУ. С коммутатора сигнал от выбранной камеры поступает или на передатчик телевизионных сигналов или на передатчик по витой паре (при работе МРК по кабелю).
Рисунок 3
Движение МР осуществляется моторами-звездочками, приводящими в движение гусеницы. Для повышения проходимости и маневренности предусмотрено изменение геометрии гусеничных обводов транспортного средства. Изменяя направление вращения моторов-звездочек, можно менять направление движения МР.
Погрузочно-разгрузочные работы осуществляются манипулятором, имеющим пять ориентирующих степеней подвижности: вращение относительно вертикальной оси, подъем плеча, качание предплечья и конечного звена, ротация схвата. Каждое движение осуществляется с помощью отдельных электромеханизмов.
Маркировка и пломбированиеНа корпусе МР около панелей управления укреплена табличка, на которой нанесены:
наименование изделия, порядковый номер МР и год изготовления по системе предприятия-изготовителя.
Маркировка ящиков (чемоданов) с комплектами запасных частей, инструментов и принадлежностей (далее – комплектами) выполнена по ГОСТ 14192-96.
На ящиках нанесены манипуляционные знаки по ГОСТ 14192-96, а также номер ящика.
Комплект упаковки и комплект ЗИП
2.1.6.1 Комплект упаковки предназначен для транспортирования и хранения МР, аппаратуры ПДУ эксплуатационной документации, ЗИП и состоит из пяти ящиков (чемоданов), в которых размещены:
ящик 1 – инструмент, пульт технологический, мультиметр, кабели (рисунок 4);
ящик 2 – зарядные устройства, ОТУ1 и ОТУ2 при транспортировании и хранении (рисунок 5).
ящик 3 – сменные губки, катушка кабельная, элементы гусениц (рисунок 6);
ящик 4 – дополнительное оборудование (рисунок 7).
Комплект инструмента уложен в сумку скатку (рисунок 8).
2.1.6.2 Состав комплекта ЗИП представлен в ведомости ЗИП (НТ598.00.00.000ЗИ).
Рисунок 4 Рисунок 5
Рисунок 6 Рисунок 7
Рисунок 8
Описание и работа составных частей МРК
Мобильный роботМР (рисунок 1) представляет собой самоходное, управляемое дистанционно, гусеничное транспортное средство с манипулятором, бортовой частью системы управления и телевизионной системой, оснащаемое дополнительным сменным оборудованием, состав которого меняется в зависимости от выполняемой задачи.
Управление МР осуществляется по кабелю или по радио.
2.2.1.1 Транспортное средствоТранспортное средство с изменяемой геометрией гусеничного обвода (рисунок 9) состоит из корпуса 1, ведущих мотор-звездочек 2, полиуретановых гусениц 3, балансирных тележек 4 и 5 , механизмов натяжения 6, поступательных электромеханизмов 8 типа МП-250Р и направляющих роликов 9.
Мотор- звездочка 2 состоит из корпуса, в котором установлен электродвигатель типа ДБМ120-1-2.5-2 с датчиком положения ротора типа ВТ80 и тахогенератором.. Мотор-звездочка предназначена для создания необходимого вращающего момента, передаваемого на гусеницу и обеспечивающего требуемое тяговое усилие. Передаточное отношение планетарного редуктора мотор-звездочки равно 54. Максимальный момент на мотор-звездочке 160 Н•м.
Гусеница 3 состоит из отдельных армированных полиуретановых элементов, скрепленных между собой с помощью серег и пальцев и предназначена для передачи тягового усилия на грунт и обеспечения движения.
Балансирные тележки состоят из корпуса (поз.5), в который запрессована неподвижная ось (поз.7). На ось насажены два балансира. Балансиры могут совершать качательные движения на осях. Подвеска пружинная, зависимая. Пружина установлена между рычагов балансиров. Для ограничения угла качания балансиров с катками на корпусе установлены резиновые отбойники. С крайних сторон в балансирах на осях установлены алюминиевые катки большего диаметра (поз. 8). С другой стороны установлен балансир с балансирной тележкой с катками меньшего диаметра (поз.10).
Балансирные тележки предназначены для передачи усилий от поверхности движения на корпус МР, они уменьшают динамические нагрузки и гасят колебания корпуса МР.
5 9
368 710142
Рисунок 9
Механизм натяжения (рисунок 10) состоит из фланца (поз.1), закрепленного на корпусе МР. На хвостовую часть фланца насажен на подшипниках скольжения сварной корпус (поз.2), который жестко соединен с наружной цилиндрической частью телескопического корпуса (поз.3). Внутри него расположен ползун, который может перемещаться под действием пружин. Пружины обеспечивают натяжение гусеницы через колесо (ленивец) (поз.4). Направляющий ролик (поз.5), установленный на корпусе МР, задает направление гусеничного обвода при поднятых гусеницах.
Электромеханический поступательный привод МП-250Р (поз. 7) служит для обеспечения изменения геометрии гусеничного обвода посредством изменения положения механизма натяжения относительно корпуса МР.
Корпус МР — сварной из алюминиевого сплава. Все отсеки, кроме кормового, пылевлагонепроницаемые. В корпусе размещены аккумуляторные батареи для энергообеспечения и блоки бортовой части системы управления. На корпусе закреплены элементы ходовой части, манипулятор и навесное технологическое оборудование.
4118910
31275
Рисунок 10
При вращении моторов-звездочек обоих бортов в одном направлении МР совершает прямолинейное движение.
При вращении моторов-звездочек левого и правого бортов в разных направлениях происходит поворот МР на месте. При повороте направо (налево) правая (левая) гусеница движется назад, левая (правая) – вперед.
При прекращении движения МР происходит динамическое торможение электродвигателей моторов-звездочек.
Манипулятор
Манипулятор (рисунок 11) состоит из опорно-поворотного устройства (поз. 1), плеча (поз. 2), предплечья (поз. 3) и кисти (поз. 4).
ОПУ состоит из неподвижного основания и поворотной части. Неподвижное основание имеет фланец для установки манипулятора на корпусе МР. На неподвижной части ОПУ смонтирован привод вращения манипулятора, состоящий из электродвигателя типа ДП-50-60. Соосно с двигателем установлен нормально-замкнутый электромагнитный тормоз с вала которого через цилиндрическую передачу вращающий момент через предохранительную фрикционную муфту передается на планетарный редуктор. С вала планетарного редуктора и через цилиндрическую передачу с люфтовыбирающим механизмом момент передается на полый вал. На валу смонтированы ограничители угла поворота, конструкция которых обеспечивает угол поворота вала на угол около 400. Передаточное отношение редуктора ОПУ равно 1520. Момент на валу ОПУ ограничивается предохранительной муфтой и регулируется степенью сжатия тарельчатой пружины с помощью гаек. Предельный момент на валу ОПУ равен 300 Нм. Максимальная скорость вращения – 16 º/с. Измерение угла поворота вала производится потенциометром типа СП5-21А через мелкомодульную зубчатую передачу с люфтовыбирающим механизмом.
На фланце вала ОПУ установлен блок приводов (поз. 10 рисунок 10). На нем на подшипниках качения смонтировано плечо манипулятора, выполненное в виде двух параллельных щек (поз. 11 рисунок 9) и связанных между собой корпусом-стяжкой (поз. 5 рисунок 11), являющейся опорой для хвостовика электромеханизма качания плеча типа МП-250Р (поз. 8 рисунок 9). Шток механизма шарнирно закреплен на корпусе блока приводов. В плече применено разгрузочное устройство, выполненное в виде двух пружин растяжения (поз. 9 рисунок 10).
В верхней части плеча между двух щек установлено предплечье (поз.3 рисунок 11), шарнирно соединенное с плечом. Привод качания предплечья включает в себя электродвигатель, планетарный редуктор, цилиндрическую и червячную передачи и фрикционную предохранительную муфту, расположенные в корпусе блока приводов. Вращение с вала червячного колеса передается с помощью цепной передачи на трехпоточный цилиндрический редуктор внутреннего зацепления, зубчатое колесо внутреннего зацепления которого размещено в корпусе предплечья. Угол поворота предплечья измеряется потенциометром типа СП5-21А. Общее передаточное отношение привода предплечья равно 6504. Максимальная скорость качания предплечья – 6 º/с.
Привод качания кисти выполнен аналогично приводу качания предплечья. Вращение с вала червячного колеса передается с помощью цепных передач, размещенными
5 6 7
8
9
12 3 4
Рисунок 11
в щеках плеча и предплечья. На валу выходной звездочки установлен потенциометр типа СП5-21А для измерения угла поворота кисти. Общее передаточное отношение привода кисти равно 2787. Максимальная скорость качания кисти – 9 º/с.
Кисть (рисунок 12) состоит из схвата (поз. 3) , механизма ротации (поз. 1) и механизма сжатия-раскрытия губок схвата (поз. 2).
В приводе ротации схвата (поз. 1) применен электродвигатель постоянного тока Д-12ТФ с последовательным возбуждением. В электродвигатель встроена электромагнитная нормально замкнутая тормозная муфта. Передаточный механизм привода ротации схвата содержит четыре планетарных ряда. На выходном валу планетарного редуктора установлено зубчатое колесо с шариковой предохранительной муфтой, которая предохраняет кисть от поломок при воздействии на нее внешних нагрузок. Угол вращения схвата не ограничен. Манипулятор имеет токоподвод для подключения телекамер и исполнительных устройств, устанавливаемых на (в) схвате, а в конструкции кисти установлено вращающееся контактное устройство с восьмью контактными кольцами.
6521
7438 10 9
Рисунок 12
Привод раскрытия губок схвата (поз. 2) состоит из электродвигателя, планетарного редуктора, цилиндрической передачи с предохранительной шариковой муфтой и передачи винт-гайка.
Манипулятор имеет пять ориентирующих степеней подвижности:
— поворот манипулятора вокруг вертикальной оси;
— качание плеча;
— качание предплечья;
— качание кисти;
— ротация схвата.
Качание плеча происходит при выдвижении (втягивании) штока электромеханизма МП-250Р. Развиваемое при этом усилии создает вращающий момент относительно оси качания звена.
Качание предплечья обеспечивается цепной передачей, расположенной в щеке плеча и приводимой в движение электродвигателем через цилиндрическую и червячную передачу, расположенные в блоке приводов.
Качание кисти обеспечивается цепной передачей, расположенной в кронштейне предплечья и цепной передачей, расположенной в щеке плеча и приводимой в движение электродвигателем через цилиндрическую и червячную передачу, расположенные в блоке приводов.
Поворот манипулятора происходит при обкатке шестерен, установленных на валу привода ОПУ, по неподвижному зубчатому колесу.
Ротация схвата происходит при вращении вала электромеханизма, размещенного на корпусе кисти манипулятора.
Раскрытие (закрытие) губок схвата происходит при вращении вала электродвигателя, установленным на корпусе кисти манипулятора.
2.2.1.3 Бортовая система дистанционного управления
Бортовая часть система дистанционного управления обеспечивает управление движением, работой исполнительных механизмов мобильного робота и решение поставленных оперативно-тактических задач на расстоянии – по радиосигналу или по кабелю.
Функционально бортовая часть СДУ состоит из:
— блока управления МР;
— блоков управления транспортным средством;
— бортового блока управления манипулятором;
— передатчика телевизионных сигналов;
— бортовой катушки с кабелем управления;
— комплекта антенно-фидерных устройств.
Дистанционное управление осуществляется с пульта по радиоканалу или по кабельной линии управления.
Дальность работы составляет, м:
— по радиоканалу до 1000;
— по кабелю до 200.
СДУ защищена от влияния непреднамеренных помех промышленного и атмосферного характера, а также помех, вызываемых работой элементов МРК.
Бортовая часть СДУ выполняет следующие задачи:
— прием управляющих команд по радиоканалу и по кабелю;
— передачу ТВ-изображений с телекамер и телеметрии по радиоканалу и по кабелю;
— управление скоростью движения и поворота МР;
— пропорциональное управление двухстепенным устройством наведения ТВ- камер обзора;
— управление пятью приводами МП;
— включение-выключение телевизионных камер;
— пропорциональное регулирование усилия сжатия схвата;
— включение-выключение осветителей;
— включение-выключение светового маяка и звукового сигнала;
— отработку команд по управлению объективом-трансфокатором;
— отработку команд по переходу управления с «Радио» на «Кабель»;
— отработку команд по приведению в действие дополнительного оборудования;
— передачу по каналу телеметрии информации о состоянии боевой цепи срабатывания спецсредств, величине зарядки бортовых аккумуляторов, углах крена и дифферента, данных с приборов разведки;
— выдачу команд приведения в действие систем пожаротушения и охлаждения МР.
Расположение аппаратуры бортовой части системы управления показано на рисунке 2, поз. 2.
В случаях, когда управление по радиоканалу затруднено или невозможно в результате действия внешних электромагнитных возмущающих факторов, используется кабельное управление МР при помощи КЛУ. КЛУ (поз.1, рисунок 13) обеспечивает передачу команд управления с ПУ на борт МР, передачу команд приведения в действие спецсредств и приём ТВ-сигналов с борта МР на ПУ.
КЛУ обеспечивает размещение и свободное наматывание и сматывание кабеля управления длиной до 200 метров.
2
5
4
1
3
Рисунок 13
2.2.1.4 Телевизионная система
Бортовая телевизионная система состоит из двух обзорных телевизионных установок ОТУ 1 (поз. 9, рисунок 1) и ОТУ2 (поз. 6), телекамера ТК3 (поз. и ТК5 (поз. 7).
2.2.1.4.1. Обзорная телевизионная установка ОТУ1
ОТУ1 предназначена для наведения ТВ-камеры на исследуемый объект, преобразования изображения в видеосигнал и передачи его через передатчик видеосигнала на монитор ПУ.
ОТУ1 (рисунок 14) состоит из механизма наведения (поз. 1), на оси которого закреплен кронштейн (поз. 2). На кронштейне с помощью гаек «барашек» закреплена телекамера ТК1 (поз. 3). Кабель телекамеры подключается к разъему на корпусе механизма наведения.
Механизм наведения обеспечивает наведение телекамеры по горизонтальной и вертикальной плоскостям. Сигналы с телекамеры поступают через цепь в корпусе механизма наведения на разъем, расположенный на неподвижном основании.
7
1
6
3
2
5
4
Рисунок 14
Крепление ОТУ1 к кронштейну манипулятора (поз. 5 рисунок 14) обеспечивается через унифицированное посадочное место, выполненное в виде «ласточкина хвоста» (поз.6), и фиксируется винтом (поз. 4).
Обзорная телевизионная установка ОТУ2
ОТУ2 предназначена для наведения ТВ-камер на исследуемый объект, преобразования изображения в видеосигнал и передачи его через передатчик видеосигнала на монитор ПУ ПДУ.
ОТУ2 (рисунок 15) состоит из механизма наведения (поз. 1), на оси которого закреплен кронштейн (поз. 2), к которому в свою очередь крепится еще один кронштейн (поз.3) . На кронштейнах закреплены две телекамеры ТК2 и ТК6 (поз. 4 и 5). Кабельная розетка телекамер подключается к вилке на корпусе механизма наведения.
6
9
8
7
4
3
5
5
1
2
Рисунок 15
Гайки «барашки» позволяют настроить угловое положение телекамеры ТК6 (поз. 5).
Механизм наведения обеспечивает наведение телекамер по горизонтальной и вертикальной плоскостям. Сигналы с телекамер поступают через цепь в корпусе механизма наведения через вилку разъема установленного на неподвижном основании МН на розетку кабеля.
Крепление ОТУ2 к кронштейну манипулятора обеспечивается через унифицированное посадочное место, выполненное в виде «ласточкина хвоста» и фиксируется аналогично как и ОТУ1 винтом.
2.2.1.4.3 Телекамера ТК1
Телекамера предназначена для преобразования изображения в видеосигнал и передачи его через передатчик видеосигнала на монитор ПУ ПДУ.
Основным элементом телекамеры является цветная видеокамера с трансфокатором типа ZBN-21Z23F, которая имеет следующие характеристики:
— матрица ………………………………. 1/4» SUPER HAD CCD;
— горизонтальное разрешение, твл ……………………………………………… 580;
— минимальная освещенность, лк ……………………………. 0.5 (день)/ 0,1 (ночь);
— объектив …………………….23-кратный оптический (и 10-кратный цифровой);
— фокусное расстояние объектива, мм ……………………………………. 3,6 – 97,2;
— электронный затвор , сек ……………………………………………. 1/50-1/10 000;
— отношение сигнал/шум, дБ, более………………………………………………. 50;
— выходной сигнал ………………………………….………………. 1В/75 Ом, PAL;
— напряжение питания, В …………………………………………………………. 12;
— рабочий диапазон температур, ºС ……………………………… минус 10 … +50;
— размеры, мм ………………………………………………………….… 63×62×120;
— вес, г ………………………………………………………………………..…… 300.
В качестве осветителя в телекамере используется галогенная лампа. Управление трансфокатором производится с ПУ ПДУ. Фокусировка изображения осуществляется видеокамерой автоматически. При необходимости, фокусировка может быть осуществлена вручную с ПУ ПДУ.
Конструктивно телекамера состоит из корпуса, внутри которого закреплена видеокамера. С торцов корпус закрывается крышками через прокладки, обеспечивая герметичность телекамеры. Кабель с разъема видеокамеры проходит через патрубок и заканчивается розеткой. На корпусе закреплен козырек (поз. 3 рисунок 14) с фарой (поз. 7 рисунок 14). Фара состоит из галогенной лампы, установленной в корпусе. Контакты галогенной лампы заведены в патрон.
Телекамеры ТК2 и ТК6
Телекамеры предназначены для преобразования изображения в видеосигнал и передачи его через передатчик видеосигнала на монитор ПУ ПДУ.
Конструктивно телекамеры одинаковы и отличаются только схемой распайки выходного разъема.
Основным элементом телекамеры является цветная видеокамера без трансфокатора Корейского производства типа CTW-CH-B3,6, которая имеет следующие характеристики:
— матрица …………………………………… 1/3» SONY SYPER HAD II CCD;
— разрешение по горизонтали, твл …………………………………………. 540;
— чувствительность, лк ……………………………………………………… 0,1;
— фокусное расстояние объектива, мм …………………………………….. 3,6;
— электронный затвор, сек …………………………………….. 1/50-1/100 000;
— отношение сигнал/шум, дБ, не менее …………………………………….. 46;
— выходной сигнал ……………………………………………. 1В/75 Ом, PAL;
— напряжение питания, В …………………………………………………… 12;
— потребляемый ток, мА …………………………………………………… 120;
— рабочий диапазон температур, ºС ………………… от минус 10 до плюс 50;
— размеры, мм ………………………………………………… диаметр 21,5×76;
Телекамера (рисунок 15) состоит из корпуса (поз. 6), внутри которого закреплена видеокамера (поз. 4) и блок светодиодной подсветки (поз. 7). Кабель с видеокамеры и блока светодиодной подсветки проходит через отверстие в корпусе и заканчивается розеткой.
2.2.1.4.5 Механизм наведения двухстепенной
Механизм предназначен для вертикального наведения (ВН) телекамер ТК1 и ТК2 и ТК6 в пределах ±35° и горизонтального наведения (ГН) в пределах 360°.
Механизм наведения (рисунок 15) состоит из блока приводов (поз.1), на который установлен корпус (поз. с зубчато-ременной передачей. На выходной вал (поз. 9) устанавливаются кронштейны, на которых размещены телекамера ТК1 (в составе ОТУ1) или ТК2 (в составе ОТУ2) .
2.2.1.4.6 Телекамера ТК3
Телекамера предназначена для передачи изображения со схвата в систему видеонаблюдения и используется для наблюдения за работой схвата и прицеливания.
Телекамера состоит из корпуса (поз. 5, рисунок 12), внутри которого закреплены видеокамера (поз. 4) и блок светодиодной подсветки (поз. 6). В качестве телевизионной камеры в телекамере ТК7 применена видеокамера цветного изображения типа GF-Q1325H, которая имеет следующие характеристики:
— матрица ………………………………… 1/3» SONY SYPER HAD II CCD;
— разрешение по горизонтали, твл, не менее …………………………… 600;
— чувствительность, лк ……………………………………………………. 0,2;
— фокусное расстояние объектива, мм …………………………………….3,6;
— электронный затвор ………………………………………… 1/50-1/100 000;
— отношение сигнал/шум, дБ, не менее ………………….……………….. 48;
— выходной сигнал ………………………………………….. 1В/75 Ом, PAL;
— напряжение питания, В ……………………………………… 12в (10%);
— потребляемый ток, мА …………………………………………………..80;
— рабочий диапазон температур, ºс ………………от минус 10 до плюс 50;
— размеры, мм ………………………………………………………2525×22;
— вес, г., не более …………………………………………….…..……… 100.
2.2.1.4.7 Телекамера ТК5
Телекамера предназначена для передачи изображения в систему видеонаблюдения и используется для вождения МР и наблюдения за дорогой.
Телекамера конструктивно выполнена аналогично камере ТК3 и состоит из корпуса, внутри которого закреплена видеокамера GF-Q1325H (такая же, как и в ТК3) и блок светодиодной подсветки.
2.2.1.5 Автономный источник питания
В качестве автономного источника питания (АИП-1) для МР применяются два автомобильных аккумулятора напряжением 12 В и емкостью 72 А/ч каждый, расположенные в МР (поз. 1, рисунок 2). АИП-1 предназначены для обеспечения работы ходовых двигателей МР, исполнительных механизмов и электронных блоков бортовой части СДУ, ТВ-системы МР.
АИП-1 обеспечивают непрерывную работу МР в течение 4-х часов.
Примечание. Длительность непрерывной работы зависит от циклограммы выполнения работ МРК. Наиболее энергоемкими являются передвижения МР, особенно с частым маневрированием и движением в гору.
2.2.2 Пост дистанционного управления
В состав аппаратуры ПДУ входят следующие устройства:
— ПУ с монитором;
— комплект антенн;
— штатив для крепления антенн;
— автономный источник питания;
— комплект кабелей.
2.2.2.1 Пульт управления.
Пульт управления предназначен для формирования команд дистанционного управления мобильным роботом, получения телевизионного сигнала от телекамер и отображения телеметрической информации, поступающей с мобильного робота.
Формирование команд осуществляется с помощью органов управления панели пульта.
Управление работой робототехнического комплекса осуществляется по кабелю или по эфиру.
Пульт управления осуществляет управление навесным оборудованием и обрабатывет и отображает сигналы телеметрии от мобильного робота.
Сигналы телеметрии робототехнического комплекса отображаются на дисплее панели управления и имеют как графическое, так и цифровое отображение.
2.2.2.1.1. Состав пульта управления.
Структурная схема пульта управления представлена на рисунке 16.
Панель управления
Панель отображения
Радиомодем
Приёмник/передатчик по кабелю
Монитор
Плата коммутации
Приёмник TV
Преобразователь напряжения DC/DC
Рисунок 16
На дисплей панели управления выводится мнемосхема робототехнического комплекса (рисунок 20) с телеметрическими данными о состояния различных устройств и механизмов робототехнического комплекса и состояние активных органов управления.
Панель управления формирует команды управления:
— определяет режим работы пульта управления – радио или кабель;
— выбирает активное звено (манипулятор) робототехнического комплекса;
— выбирает активную телекамеру робототехнического комплекса;
— осуществляет пропорциональное управление скоростью звеньев робототехнического комплекса и движением;
— формирует дискретные команды управления для навесного оборудования робототехнического комплекса;
— формирует команды управления транспортным средством.
На панели управления индицируются:
— активная телекамера;
— активное звено манипулятора;
— режим работы пульта управления;
— состояние управления устройств робототехнического комплекса;
Радиомодем принимает/передает команды управления и данные телеметрии робототехнического комплекса по эфиру.
Приемник/передатчик по витой паре принимает/передает команды управления, данные телеметрии робототехнического комплекса и телевизионный сигнал по кабелю.
Плата коммутации осуществляет управление режимами работы пульта управления.
Преобразователь напряжения DC/DC – вырабатывает напряжения необходимые для работы пульта управления 5В и 24В.
Конструктивно пульт управления МРК (рисунок 17) выполнен в виде кейса. Габаритные размеры пульта управления – 380х320х230мм. В крышке кейса располагается 12-и дюймовой монитор. На лицевой панели расположены органы управления и 6-и дюймовый дисплей панели управления. Крышка кейса обеспечивает защиту, установленных на панели управления элементов и запирается замками. Сзади крышка крепится к корпусу пульта через петли. Конструкция петель позволяет крышке принимать фиксированное положение при открывании.
С левой боковой стороны корпуса пульта в углублении установлены разъемы для подключения пульта, также закрытые крышкой. Обе крышки крепятся к корпусу при помощи двух невыпадающих винтов с рифлеными головками. Электронные блоки выполнены на печатных платах и установлены внутри корпуса на стойках к панели. Пылебрызгозащита пульта обеспечена лабиринтным уплотнением по периметру крышки и корпуса пульта. Для переноски ПУ и обеспечения работы с ПУ вне стационарных условий на передней боковой стенке корпуса установлена ручка.
3
2
1
Рисунок 17
2.2.2.1.2. Устройство и работа пульта управления.
Перед включением пульта управления в работу необходимо произвести подключение в соответствии со схемой, приведенной на рисунке 18.
Пульт управления МРК-МВТ
Аккумуляторная
батарея 12В
Антенна радиомодема
Приёмник TV сигнала
«РАДИО»
«ВИДЕО»
«ПИТАНИЕ»
«КАБЕЛЬ»
Робототехнический комплекс МРК
Рисунок 18
Подключение пульта производится на панели, расположенной с левой стороны корпуса, где установлены четыре разъема для подключения: кабеля антенны радиоуправления (поз. 1, рисунок 19), кабеля управления (поз. 2), кабеля антенны ТВ (поз. 3) и зарядного устройства (поз. 4).
Примечание: при работе пульта по радиоканалу «кабель» к мобильному роботу не подключать.
Рисунок 19
2.2.2.1.3. Включение пульта управления
В левой верхней части лицевой панели (рисунок 21) расположены специальный переключатель с ключом (поз. 1). Включение ПУ осуществляется путем поворота специального ключа по часовой стрелке. При наличия питания загорается индикация ВКЛ и в течении 1-2 с горят все индикаторы панели управления.
2.2.2.1.4. Выбор режима работы пульта управления.
На панели пульта (рисунок 21) включить тумблер «РАДИО», поз. 32 или «КАБЕЛЬ» поз. 33. При выбранном режиме работы пульта загорается соответствующий индикатор. Повторное нажатие на тумблер режима работ переводит пульт в автономное состояние и индикация режима гаснет. В этом состоянии пульт управления не имеет связи с МР.
При включении питания и завершения загрузки программы на дисплее панели управления появится основное графическое окно пульта управления. Вид основного кадра пульта управления представлен на рисунке 20.
4
3
2
2
1
6
5
Рисунок 20
2.2.2.1.5. Формирование команд управления
Формирование команд управления МР производится органами управления с использованием тумблеров, кнопок и джойстиков.
Панель пульта разбита на функциональные зоны управления:
— режим работы пульта;
— телевидение;
— выбор группы приводов;
— выбор команд;
— выбор меню команд.
Каждая зона управления формирует соответствующие команды управления.
Блокировка всех органов управления пульта производится тумблером – «БЛОКИРОВКА». При активном состоянии режима блокировки пульт не реагирует на органы управления. Повторное нажатие на тумблер «БЛОКИРОВКА» разрешает работу органов управления. Состояние блокировки на панели пульта имеет индикацию активного состояния.
На монитор панели пульта выводится следующая информация в цифровом и графическом виде:
— подсвечивается зелёным цветом на мнемосхеме активное звено манипулятора;
— режим работы пульта управления;
— активная телекамера МР;
— значение заряда аккумуляторных батарей на борту;
— значение отклонения по джойстикам.
— температура вне борта и внутри приборного отсека;
— информация с приборов радиационной и химической разведки;
— показания потенциометров подвижных частей манипулятора ;
— угол крена;
— угол дифферента;
— степень зарядки боевых конденсаторов;
— мониторинг канала приема /передачи.
Панель управления пульта управления представлена на рисунке 21.
Рисунок 21
1 — ключ включения питания пульта управления;
2,4 — тумблеры включения спецсредств;
3 – монитор панели управления;
5 – ключ выбора «спецсредств»;
6,7,11,12 — кнопки выбора дискретных команд управления;
8,9,10,13 — тумблеры выбора номера меню;
14 — регулировка фокуса телекамеры;
15 — выбор признака управления телекамерами;
16 – выбор признака управления приводами;
17 — регулирование масштабом телекамеры;
18 – левый джойстик 2-х координатный с кнопкой;
19,20,24,25 – тумблеры выбора телекамеры;
21,22,23 – выбор активного привода манипулятора;
26 – правый джойстик 2-х координатный с кнопкой;
27 — выбор механизма подъёма/опускания гусениц;
28 – выбор работы управления транспортным средством;
29 – выбор квадратора;
30 – переключение по монитору и инверсия изображения;
31 – блокировка и сброс пульта в исходное состояние;
32 — выбор режима работы пульта по радиоканалу;
33 — выбор режима работы пульта по кабелю.
Взаимосвязь органов управления пульта и команд управления определены в таблице 3.
Таблица 3
№№ Наименование параметра Характеристика
1 СЕРВИС ПУЛЬТА
1.1 ПИТАНИЕ ВКЛ/ВЫКЛ
Включение питания пульта .
1.2 РАДИО
Подключается канал приема/передачи по радио
Тумблер с подхватом вверх – радио. Повторное нажатие в туже сторону канал отключается
1.3 КАБЕЛЬ Подключается канал приема/передачи по кабелю.
Тумблер с подхватом вверх – кабель. Повторное нажатие в туже сторону канал отключается
1.4 БЛОКИРОВКА Канал приема/передачи включен, блокируются органы управления на пульте. Тумблер с подхватом вверх – включено. Повторное нажатие снимает блокировку с органов управления.
1.5 СБРОС Установка настроек пульта по умолчанию:
Режим работы пульта – автономная работа ;
Тумблер «Блокировка» — режим «выключено»;
Тумблер правый «РАБОТА» – режим «выключено»;
Тумблер «РАБОТА»– режим «выключено» М1…М6»;
Тумблер «Подъём гусениц» — режим «выключено»;
Тумблер «Привод наведения ТК»
— режим «выключено»;
Тумблер «Квадратор» — режим «выключено»;
Тумблеры «Выбор меню команд»
— режим «включено» 1-МЕНЮ;
Тумблеры выбор «Телекамеры» — 1-ая телекамера.
№№ Наименование параметра Характеристика
2 От пульта на МР
2.1 Движение робота (вперед – назад, вправо-влево) пропорционально по скорости.
Число градаций скорости ±127. Пропорциональный левый джойстик 2-х координатный с кнопкой
Тумблер левый «РАБОТА» – режим «включено»;
Нажатие кнопки джойстика разрешает управление движением робота. При отпускании кнопки джойстика движение прекращается.
2.2 Подъем /опускание гусениц Пропорциональный левый джойстик 2-х координатный с кнопкой.
Тумблер «Подъём гусениц» – режим «включено»;
Поднятие, опускание гусениц осуществляется с помощью левого джойстика:
для левой гусеницы направление ↑,↓; для
для правой гусеницы направление ←,→.
2.3 Управление манипулятором пропорционально по скорости.
Число градаций скорости ±127. Пропорциональный джойстик 2-х координатный с кнопкой.
Тумблер правый «РАБОТА» – режим «включено».
Тумблерами «ВЫБОР ПРИВОДА» с самовозвратом и с подхватом активируются степени манипулятора (3- тумблера, шесть вариантов выбора приводов).
2.4 ВЫБОР ПРИВОДА
Панель «ВЫБОР ГРУППЫ ПРИВОДОВ» Тумблеры с самовозвратом и с подхватом:
Положение 1 – резерв;
Положение 2 — Левый джойстик управление движением робота; Правый джойстик управление М3 (↑↓) (качание предплечья) + М4 (←→) (качание кисти) ;
Положение 3 — Левый джойстик управление движением робота; Правый джойстик управление
М5 (←→ ) (ротация кисти) – (↑↓) (Сжатие схвата).
Положение 4 – резерв;
Положение 5 – резерв;
Положение 6 — Левый джойстик управление движением робота. Правый джойстик управление М1(←→) (ротация манипулятора) + М2(↑↓) (качание плеча)
2.5 Управление телевидением
Пропорциональный правый джойстик 2-х координатный с кнопкой.
Тумблер «ПРИВОД НАВЕДЕНИЯ ТК» — режим «включено»;
Тумблерами панели «ТЕЛЕВИДЕНИЕ» с самовозвратом и с подхватом активируются телекамеры (4 тумблера, восемь вариантов выбора телекамер).
№№ Наименование параметра Характеристика
2.6 Выбор телекамер.
Панель «ТЕЛЕВИДЕНИЕ» Положение 1 — ТК-1
Положение 2 — ТК-2
Положение 3 — ТК-3
Положение 4 — ТК-4
Положение 5 — ТК-5
Положение 6 — ТК-6
Положение 7 — ТК-7
Положение 8 — ТК-8
2.7 Управление двух координатным механизмом наведения телекамер
Число градаций скорости ±127. Правый пропорциональный джойстик 2-х координатный.
Тумблер «ПРИВОД НАВЕДЕНИЯ ТК»- режим «включено»;
Правый джойстик — ↑,↓- подъём/опускание;
←,→ — вращение
2.8 Команда «ФОКУС ± » Тумблер «ФОКУС»-↑,↓
2.9 Команда «ZOOM ± » Тумблер «ZOOM »-↑↓
2.10 Команда «КВАДРАТОР» — Тумблер «» вверх – включение режима «квадратор». Повторное нажатие отключает режим «квадратора» (в данной поставке не реализован).
2.11 Команда «ПЕРЕМЕЩЕНИЕ» Тумблер «» ↑, — перемещение дополнительного окна по экрану монитора (в данной поставке не реализован).
2.12 Команда «ИНВЕРСИЯ» Тумблер «» ↓, — основное и дополнительное окно на мониторе меняются местоположением. Повторное нажатие возвращает в исходное состояние (в данной поставке не реализован).
2.13 Команды «СПЕЦСРЕДСТВА»
Ключ в положении:
С1- оружие1;
С2- оружие2;
С1+С2- оружие1+2;
СБРОС- сброс оружия.
Выстрел — одновременное нажатие двух тумблеров ПУСК.
Команды дискретного управления формируются с помощью 4-х тумблеров на панели «ВЫБОР МЕНЮ КОМАНД» и 4-х кнопок на панели «ВЫБОР КОМАНД» (рисунок 22).
Выбор конкретной команды пункта меню производится нажатием кнопки «ВЫБОР КОМАНД» (рисунок 23). При нажатии кнопки (поз.1) фон команды «Фара» на дисплее панели управления становится зеленым. Это состояние соответствует активации выбранной дискретной команды управления. Повторное нажатие на кнопку сбрасывает дискретную команду управления. При нажатии кнопок (поз. 2, 3, 4) соответственно изменяется фон команд «ЛЦУ», «Маяк» и «Сирена» на дисплее панели управления.
Рисунок 22
1
4
3
2
Рисунок 23
Выбор меню производится переводом тумблера, расположенного на панели «ВЫБОР МЕНЮ КОМАНД» в одно из 6-и положений. На панели « МЕНЮ НАСТРОЕК» выбирается одно из 2-х положений.
Таблицы дискретных команд
МЕНЮ 1 (по умолчанию)
№ Наименование Примечание
1 «Фара» Вкл/Выкл фары телекамеры на борту МР
2 «ЛЦУ Вкл/Выкл лазерного целеуказателя на борту МР (в МРК-РП не используется)
3 «Маяк» Вкл/Выкл маяка на борту МР
4 «Сирена» Вкл/Выкл сирены на борту МР
МЕНЮ 2
№ Наименование Примечание
1 Резерв
2 Резерв
3 Резерв
4 «Орошение» Вкл/Выкл режима орошения МР.
МЕНЮ 3
№ Наименование Примечание
1 «Подача воды» Вкл/Выкл подачи воды
2 Резерв
3 «Компактная струя» Вкл/Выкл изменение струи
4 Резерв
МЕНЮ 4
№ Наименование Примечание
1 «12В ДК1» Вкл/Выкл оборудования 12В ДК1 на борту МР.
2 «12В ДК2» Вкл/Выкл оборудования 12В ДК2 на борту МР.
3 «24В ДК1» Вкл/Выкл оборудования 24В ДК1 на борту МР.
4 «24В ДК2» Вкл/Выкл оборудования 24В ДК2 на борту МР.
МЕНЮ 5
№ Наименование Примечание
1 «Диагностика 1» Вкл/Выкл режима диагностики 1 на борту МР (проверка дозиметра)
2 «Диагностика 2» Резерв
3 «Рабочее ПМ» Перевод манипулятора в рабочее положение
4 «Транспортное ПМ» Перевод манипулятора в транспортное положение
МЕНЮ 6 (резервные команды управления)
МЕНЮ А
№ Наименование Примечание
1 «Штатный режим» Монитор панели работает в штатном режиме (режим по умолчанию)
2 «Габариты» На мониторе панели пульта отображается в графическом виде и цифровом виде информация о положении звеньев манипулятора;
3 «Телекамера» Переводит телевизионный дисплей пульта в режим настройки параметров телекамеры.
Изменение параметров телекамеры производится тумблерами «ФОКУС» и «ZOOM».
4 «Статус» На мониторе панели управления выводится окно с информацией о состоянии МР.
МЕНЮ В
№ Наименование Примечание
1 Резерв
2 Резерв
3 Резерв
4 Резерв
2.2.2.2. Стойка с антеннами
Передача радиосигнала управления с ПУ и прием ТВ-сигнала телевизионной системы МР осуществляется с помощью антенн, устанавливаемых на штативе. Антенны подсоединяются к пульту кабелями.
2.2.2.3. Автономные источники питания
В качестве автономного источника питания ПУ используется источник питания типа mobilEn MP822, напряжением 12 В, емкостью 22 А/ч.
Для более длительной работы ПУ подключается сетевое ~220В зарядное устройство к mobilEn MP822.
2.2.3 Дополнительное оборудование
2.2.3.1 Зарядное устройство
Зарядные устройства (ЗУ) предназначены для зарядки аккумуляторов автономных источников питания МР и ПУ от сети переменного тока напряжением 220 В, 50 Гц, а также для ускоренной зарядки за время, в два раза меньшее номинального времени заряда (5-6 часов).
Зарядное устройство состоит из 3-х отдельных зарядных устройств (рисунок 24) двух типов.
Для зарядки аккумуляторов МР в МРК используются два зарядных устройства “Орион PW320” или “Орион PW325”, объединенные в один блок и имеющие один общий выходной разъем для подключения к разъему для зарядки МР. Для зарядки автономного источника питания ПУ используется зарядное устройство “Орион PW260” или “Орион PW265”, ГОСТ Р МЭК 60335-2-29-98, ГОСТ Р 51318.14-99, ГОСТ Р 51527-99 имеющий выходной разъем (поз. 7) для подключения к разъему «Питание» автономного источника питания ПУ.
Зарядные устройства обеспечивают зарядку автономных источников питания МРК от сети переменного тока напряжением 220 В, 50 Гц. Выходные параметры ЗУ обеспечивают зарядку аккумуляторных батарей в номинальном и ускоренном режимах. При достижении полной зарядки, ЗУ автоматически отключается. Контроль за процессом зарядки аккумуляторов осуществляется по светодиодному линейному индикатору или стрелочному прибору в зависимости ото марки ЗУ.
Зарядные устройства также используется, как источник питания при продолжительном использовании МРК (при одновременном подключении аккумуляторных батарей).
Характеристики ЗУ “ Орион 260” и “Орион PW265”:
— напряжение питающей сети, В……………………………………..180-240;
— диапазон плавной регулировки выходного тока, А..…………не менее 0,4 – 6;
— выходное напряжение в режиме стабилизации тока (равно напряжению
на клеммах аккумуляторной батареи), В…………………..от 0 до 14,6;
— выходное напряжение в режиме стабилизации напряжения
(при токе потребления меньшем, чем ток, заданный
регулятором), В…………………………………………………14,6-14,8;
— габаритные размеры ЗУ, мм…………………………….………..155x85x200;
— масса ЗУ, кг……………………………………………………….……0,85.
Характеристики ЗУ “ Орион 320” и “ Орион 325”:
— напряжение питающей сети, В……………………………………..180-240;
— диапазон плавной регулировки выходного тока, А..…………не менее 0,4 – 15;
— выходное напряжение в режиме стабилизации тока (равно напряжению
на клеммах аккумуляторной батареи), В…………………..от 0 до 14,6;
— выходное напряжение в режиме стабилизации напряжения
(при токе потребления меньшем, чем ток, заданный
регулятором), В…………………………………………………14,6-14,8;
— габаритные размеры ЗУ, мм…………………………….………..155x85x200;
— масса ЗУ, кг……………………………………………………….……0,91.
ЗУ функционируют в интервале температур от минус 10° до плюс 40°С.
Зарядные устройства снабжены комплектом кабелей для зарядки аккумуляторов в составе МРК через разъемы для зарядки, установленные на корпусах МР и автономного источника питания ПУ.
1
5
4
3
1
2
4
3
2
8
6
9
8
7
6
Рисунок 24
2.2.3.2 Технологический пульт управления с кабелем
Технологический пульт управления предназначен для управления движениями МР и манипулятора при техническом обслуживании и при погрузке МР для транспортировки.
Конструктивно технологический пульт управления (рисунок 25) состоит из корпуса (поз. 1), являющегося лицевой панелью и кабеля (поз. 2) со штепсельным разъемом (поз. 3). На лицевой панели расположены кнопки выбора привода (поз. 5) и джойстик управления (поз. 4). Для проведения работ с мобильным роботом пульт подключается посредством кабеля к разъему «Пульт» (поз. 1, рисунок 28) на приборной панели МР.
4
5
3
2
1
Рисунок 25
2.2.3.3 Комплект сменных губок схвата
Комплект сменных губок схвата предназначен для обеспечения надежного захвата предметов различной формы и размеров.
Комплект сменных губок схвата (рисунок 26) состоит из:
а) плоских прямых губок (поз. 7, рисунок 11), установленных штатно на кисти манипулятора для захвата рабочего оборудования и плоских предметов;
б) узких удлиненных губок (поз. 2) для захвата мелких предметов, расположенных в щелях шириной 20 мм и более, глубиной до 200 мм и отверстиях диаметром 40 мм и более;
в) губок типа грейфер (поз. 1) с диаметром внутренней полости 160 мм;
г) губок для захвата цилиндрических предметов (поз. 3) диаметром от 50 до 200 ммОсновой комплекта являются губки схвата прямые с колодкой (поз. 7, рисунок 12), которые состоят из колодки (поз. с фиксатором и прямых губок (поз. 7). Первоначальное раскрытие губок в схвате может быть изменено в зависимости от того, в каком положении будут зафиксированы губки схвата. Для этого губки схвата имеют несколько фиксирующих отверстий (поз.5 рисунок 26) на сопрягаемых поверхностях. Все губки комплекта имеют унифицированное посадочное место, выполненное в виде «ласточкина хвоста». Выбранный комплект губок вставляется в посадочное место и фиксируется в выбранном положении
.
3
2
1
5
4
Рисунок 26
2.2.4. Комплект ЗИП одиночный
Комплект ЗИП для МРК включает в себя набор ключей, отверток и другие принадлежности и инструмент, перечисленные в подразделе 2.1.6 настоящего РЭ и представленные на рисунках 4, 5, 6 и 8.
Использование по назначению
Эксплуатационные ограничения.
При эксплуатации МРК следует учитывать ряд ограничений, несоблюдение которых недопустимо по условиям безопасности и может привести к выходу МРК из строя.
При движении назад не допускается наезд на кабель (при управлении по кабелю).
Не допускается разворачивать МР с минимальным радиусом поворота ( на месте) на крутых косогорах, в ямах, рвах, на песчанных и гравийных поверхностях и т.п. во избежание спадания гусениц и повреждения МР. Поворотов в этих случаях рекомендуется выполнять чередуя поворот на небольшой угол с прямолинейным движение вперед-назад.
Если высота препятствия выше допустимой по техническим характеристикам или заранее неизвестна, его следует объехать. При работе с грузом движения через пороговые или другие виды препятствий следует избегать.
Если глубина водной преграды заранее не известна, ее следует объехать.
При движении МР по местности, заваленной различными предметами (камнями, обломками и т.п.), избегать попадания крупных (свыше 7-9 см в поперечнике) предметов под корпус во избежание зависания МР.
Не допускается использовать манипулятор для перемещения грузов без отрыва от поверхности рабочей площадки.
МРК предназначен для эксплуатации в районах с умеренным климатом.
Климатически защищенные устройства изделия – мобильный робот, сменные технологические модули и катушка с кабельной линией управления – рассчитаны на эксплуатацию при температуре окружающей среды от минус 40 до плюс 40°С и относительной влажности воздуха не более 98% при температуре плюс 25°С.
В зимнее время, при отрицательных температурах, избегайте нахождения МР в нерабочем состоянии на открытом воздухе. Рабочее состояние МР (особенно подвижные кабельные части и телекамеры) поддерживается за счет собственного выделения тепла и, в этом случае, выдерживают температуру до минус 40°С.
Пульт управления рассчитан на эксплуатацию при температуре окружающей среды от 0 до плюс 40°С и относительной влажности воздуха не более 98% при температуре плюс 25°С.
Зарядное устройство рассчитано на эксплуатацию при температуре окружающей среды от минус 10 до плюс 40°С и относительной влажности воздуха не более 90% при температуре плюс 20°С.
После хранения изделия в холодном помещении или после перевозки в зимних условиях перед использованием необходимо дать ПУ и ЗУ прогреться при температуре не ниже плюс 10°С в течение двух часов.
После завершения работ не допускается оставлять включенным питание МР и ПУ.
Не оставлять соединенными разъёмы зарядного устройства с МР и ПУ, при выключенном питании зарядного устройства – во избежание разрядки автономных источников питания.
Запрещается использовать изделие при снятой крышке МР и при снятых кожухах или корпусных деталях, которые защищают привода и механизмы изделия от попадания влаги и пыли.
Не прикладывать внешние воздействия к звеньям манипулятора, к кронштейнам крепления ОТУ, т.к. это может привести к поломке элементов конструкции.
Необходимо избегать воздействия ударных нагрузок на ПУ, ЗУ, штатив с антеннами – во избежание их поломок.
После использования изделия по назначению проверить наличие влаги в корпусе МР. При наличии влаги необходимо ее удалить и просушить МР в теплом помещении со снятыми крышками контрольных панелей и приборного отсека. При длительном хранении, особенно при наличии перепада температур хранение проводить при приоткрытых крышках приборного и аккумуляторного отсека МР.
Внимание! При эксплуатации осторожно обращаться с монитором ПУ, так как экран монитора выполнен из стекла. Опускание крышки ПУ производить осторожно, придерживая крышку рукой. Перед опусканием крышки проверить отсутствие посторонних предметов на лицевой панели ПУ.
Не допускается прикасаться руками или другими предметами к элементам оптики и экранам мониторов. Элементы оптики и экраны мониторы протирать только чистой, мягкой тканью (фланелью), смоченной в спирте.
Внимание! При зарядке аккумуляторов возможно образование взрывоопасной смеси. Зарядку проводить в хорошо проветриваемом помещении. Зарядку аккумуляторов МР проводить только при снятой крышке аккумуляторного отсека.
Внимание! Прежде чем использовать изделие, нужно внимательно ознакомиться с настоящим руководством по эксплуатации, с расположением элементов управления, розеток внешних соединений и надписями на корпусе МР, манипулятора и других составных частей.
Указание мер безопасности
К работе с МРК допускаются только обслуживающий персонал, прошедший подготовку в специальном учебном центре и имеющий удостоверение на право управления и работы с МРК и прошедший инструктаж по технике безопасности.
В целях надежной работы изделия и безопасности обслуживающего персонала необходимо соблюдать общие правила техники безопасности, установленные на месте эксплуатации изделия.
Применять изделие допускается только в соответствии с назначением, указанным в настоящем РЭ.
При работе с использованием дополнительного оборудования не входящего в состав МРК необходимо соблюдать требования безопасности, изложенные в руководствах по их эксплуатации на это оборудование.
Необходимо соблюдать осторожность при работе с зарядным устройством, входящим с состав изделия, так как используется входное напряжение ~ 220 В с частотой 50 Гц. Во избежание несчастных случаев требуется соблюдение общих мер безопасности от поражения обслуживающего персонала электрическим током.
Запрещается применять в зарядном устройстве предохранители изготовленные из проводников диаметром больше допустимого для каждого типа ЗУ. Перед заменой предохранителя в ЗУ не забудьте вынуть вилку из розетки электросети.
Во время зарядки АИП запрещается производить ремонтные и профилактические работы, а также проверять работоспособность изделия.
При проверке функционирования МРК запрещается находиться ближе двух метров к МР, проверять качество стыковки соединителей при включенных приводах.
Изделие не представляет опасности для жизни и здоровья человека и окружающей среды при соблюдении правил эксплуатации, хранения и транспортирования, изложенных в настоящем РЭ.
Подготовка МРК к работе
3.3.1 Развертывание МРК
3.3.1.1 МРК транспортируется к месту выполнения работ в автомобиле-фургоне.
3.3.1.2 Порядок расстопорения МР
Ослабить талрепы съемных растяжек. Снять талрепы.
3.3.1.3 Для выгрузки МР подключить технологический пульт посредством кабеля к разъему «Пульт» (поз.1) на лицевой панели МР (рисунок 27).
Включить МР, для чего установить на панели управления МР тумблер «Питание» (поз. 2) в верхнее положение.
Выбором соответствующих приводов опустить гусеницы в нижнее положение, что обеспечивает максимальную устойчивость при движении под уклон.
Произвести выгрузку МР по установленным аппарелям (трапу), используя ручку управления на технологическом пульте управления.
1 10 11 12 1373 89465 2
Рисунок 27
Установить элементы телевизионной системы: обзорные телеустановки ОТУ 1и ОТУ 2 (поз.6, и 9, рисунок 1) на манипуляторе.
3.3.2. Объем и последовательность внешнего осмотра
3.3.2.1. Внешний осмотр МР производить после его выгрузки из автомобиля.
3.3.2.2. При внешнем осмотре МРК:
а) убедиться в комплектности МРК
б) убедиться в целостности соединяющих кабелей.
в) убедиться в отсутствии ослабления крепежа и механических повреждений, способных помешать нормальной работе МРК;
г) проверить целостность и чистоту защитных стекол фар и камер, надежность стыковки соединителей на кабелях.
3.3.2.3. Описание положения органов управления и контроля МРК перед включением (рисунок 21) .
Перед включением органы управления и контроля на ПУ должны находиться в следующих положениях:
— ручки управления манипулятором и транспортным средством должны находиться в нейтральном положении (вертикально);
— переключатель (ключ) «СПЕЦСРЕДСТВА» (поз. 5) в положении «Выкл»;
— положение переключателей, тумблеров и кнопок не контролировать.
3.3.3. Подготовка МР к использованию
Извлечь два аккумулятора АИП МР из штатной упаковки, если они не были установлены в МР ранее.
Установить МР на ровную поверхность.
Проверить степень зарядки аккумуляторов. Напряжение каждого из аккумуляторов должно быть не менее 12,8 В. Замер напряжения производить любым мультиметром, имеющим класс точности не менее 0,5.
Развернуть манипулятор вручную(плавным прикладыванием усилия к плечу манипулятора протии часовой стрелки), освободив доступ к аккумуляторному отсеку. Отвернуть винты и снять крышку с аккумуляторного отсека (поз. 3, рисунок 1) МР. Установить аккумуляторы (поз. 1 рисунок 2) в аккумуляторный отсек.
Проконтролировать положение тумблера «Питание» (поз. 2, рисунок 27), который должен находиться в выключенном положении.
Подсоединить клеммы питания МР к аккумуляторам.
Внимакние! Рекомендуется перед установкой (снятием) аккумуляторов извлечь из МР блоки управления (поз. 2 и 5, рисунок 2).
Проверить правильность подсоединения питания к аккумуляторам, для чего перевести тумблер «Питание» (поз. 2, рисунок 27) в положение ВКЛ. При этом если аккумуляторы заряжены полностью должны загореться индикаторы (поз. 3), если аккумуляторы заряжены не полностью необходимости дозарядить аккумуляторы штатным зарядным устройством. Порядок зарядки аккумуляторов МР изложен в п. 3.4.2.2 настоящего РЭ.
Тумблер «Питание» перевести в нижнее положение.
Установить антенну ДУ (поз. 4, рисунок 2).
Установить стойку в сборе и телевизионную антенну (поз.10, рисунок 1).
Установить ОТУ1 и ОТУ2.
Перевести тумблер «Питание» на панели управления МР в положение ВКЛ.
МР включен и готов к работе.
3.3.4. Подготовка ПУ к использованию
При управлении МР по радиоканалу:
— извлечь штатив, кабели и антенны;
— установить на штативе антенну дистанционного управления и антенну приема телевизионного сигнала;
— подключить кабели к разъемам ПУ (см. рисунок 19).
При управлении МР по кабелю:
— установить КЛУ на стойку и закрепить хомутом (поз. 12, рисунок 1) при помощи откидного болта (поз. 5);
— подключить разъем КЛУ (поз. 1, рисунок 28) к разъему «Кабель» коммутационной коробки поз. 2 стойки МР
1
2
Рисунок 28
— подключить кабель КЛУ к разъемам ПУ (рисунок 19).
Открыв замки откинуть крышку ПУ до момента, пока крепящие петли четко не зафиксируют ее положение.
Перед включением органы управления и контроля на ПУ должны находиться в следующих положениях:
— ручки управления манипулятором и транспортным средством должны находиться в нейтральном положении (вертикально);
— переключатель (ключ) «СПЕЦСРЕДСТВА» (поз. 5) в положении «Выкл»;
— положение переключателей, тумблеров и кнопок не контролировать.
3.3.5. Порядок включения МРК
Внимание! При каждом включении контролировать положение переключателя «СПЕЦСРЕДСТВА», который должен находиться в положении «ВЫКЛ».
Запрещается производить любые перестыковки кабелей при включенных МР и ПУ.
3.3.5.1. Порядок включения МРК при управлении по кабелю
Включение МРК осуществляется в следующем порядке:
— повернуть ключ (нажать кнопку) « ПИТАНИЕ» (поз. 1, рисунок 21) на ПУ ;
— на панели пульта включить тумблер «КАБЕЛЬ» (поз. 33 рисунок 21);
При выбранном режиме работы пульта загорается соответствующий индикатор. Повторное нажатие на тумблер режима работ переводит пульт в автономное состояние и индикация режима гаснет. В этом состоянии пульт управления не имеет связи с МР.
При включении питания и загрузки программы на мониторе панели управления ПУ появится графическое окно. Вид основного кадра на мониторе пульта управления представлен на рисунке 20.
Индикатор питания на блоке питания ПУ должен показывать не менее 75% степени заряда (должны гореть не менее 2-х зеленых светодиода), если заряд аккумуляторов составляет менее данной величины требуется подзарядить аккумуляторы. На панели управления ПУ индикатор ТК1 (поз. 3, рисунок 17) должен светиться.
— включить МР, для чего на контрольной панели МР тумблер «ПИТАНИЕ» (поз. 2, рисунок 27) перевести в верхнее положение, при этом:
а) на контрольной панели « РЕЖИМ РАБОТЫ» должны начать светиться индикаторы «КАБЕЛЬ» (поз. 4) и «ДАННЫЕ» (поз. 5);
б) на контрольной панели «АБ» индикаторы питания должны показывать степень зарядки аккумуляторных батарей не менее 50% (если заряд аккумуляторов составляет 50%, то требуется дополнительно проверить степень зарядки аккумуляторов по показаниям телеметрии).
— включить монитор кнопкой «ВКЛ» (поз. 1, рисунок 17) на панели управления монитора, при этом индикатор режима работы монитора (поз. 2) меняет свой цвет с красного на зеленый. Затем кнопкой выбора режима работы монитора через его «МЕНЮ» выбрать канал AV1*. На экране монитора появляется изображение с телевизионной камеры ТК1.
— при включении МР на мониторе панели управления ПУ отобразится информация о напряжении бортовой сети МР (поз. 1, рисунок 20) и качестве связи ПУ с МР (поз. 2).
* Примечание. По умолчанию выставлен режим AV1. При необходимости настройку монитора производить в соответствии с инструкцией по эксплуатации монитора.
3.3.5.2 Порядок включения МРК при управлении по радио
Включение МР осуществляется в следующем порядке:
— подготовить ПУ к работе в режиме управления по радио в соответствии с указаниями п. 3.3.4 настоящего РЭ;
— включить питание ПУ поворотом ключа (нажатием кнопки) « ПИТАНИЕ» (поз. 1, рисунок 21) на ПУ при этом на мониторе панели управления ПУ после загрузки программного обеспечения появится графическое окно. Вид кадра представлен на рисунке 20.
— на панели пульта включить тумблер «РАДИО» (поз. 32 рисунок 21);
-включить МР, для чего на контрольной панели МР тумблер «ПИТАНИЕ» (поз. 2, рисунок 27) перевести в верхнее положение, при этом на контрольной панели « РЕЖИМ РАБОТЫ» должны начать светиться индикаторы «РАДИО» (поз. 6) и «ДАННЫЕ» (поз. 5);
Остальной порядок включения см. 3.3.5.1.
3.3.6. Проверка на функционирование
Проверка МРК на функционирование включает:
а) проверку функционирования МР в движении;
б) проверку функционирования манипулятора;
в) контроль функционирования телевизионной системы;
г) контроль функционирования дополнительного оборудования.
Проверку функционирования МР в движении следует проводить визуально при проезде МР (8-10) м передним и задним ходом и при повороте МР на месте на угол 90°.
Проверку функционирования манипулятора осуществлять путем визуального контроля движения звеньев манипулятора на холостом ходу и автоматической остановки в крайних положениях при поочередном включении приводов соответствующих звеньев манипулятора.
Последовательность включения приводов должна исключать возможность соприкосновений подвижных частей манипулятора с неподвижными частями МР.
Контроль функционирования телевизионной системы проводить в следующем объеме:
— проверка приводов ОТУ 1 и ОТУ 2, при этом визуально контролировать перемещения ОТУ, ее остановка в конечных положениях;
— проверка телекамер ТК1, ТК2, ТК3, ТК5 и ТК6 , при этом визуально контролировать качество изображения на мониторе.
Контроль функционирования дополнительного оборудования проводить в объеме:
— возможность управления МР с технологического пульта управления в объеме п. 3.4.2.3;
— возможность проверки кабеля дистанционного управления в объеме функционирования по п.3.4.1.6;
— работоспособность зарядных устройств в объеме функционирования по п. 3.4.2.2.
— работоспособность цепей боевых линий.
Проверку функционирования цепей боевых линий проводить в следующей последовательности:
— установить переключатель «ОРУЖИЕ» (поз. 5, рисунок 21) в нижнее положение;
— подключить имитатор «Оружие» к разъему «Оружие» (рисунок 27) на контрольной панели. В качестве имитаторов использовать лампочки накаливания напряжением 24 В мощностью не более 3 Вт;
— включить ПУ и МР в соответствии с п. 3.3.5 настоящего РЭ;
— установить переключатель «Оружие» в положение «I» (рисунок 27);
— установить ключ «СПЕЦСРЕДСТВА» » (поз. 5, рисунок 21) на ПУ в положение «С1» или «С2» или «С1+С2» при этом должны начать мигать соответственно индикаторы «Боевая цепь 1» или «Боевая цепь 2» или оба вместе (поз.11, 12, рисунок 27), сигнализирующие о зарядке боевых конденсаторов. Процесс зарядки отображается на ПУ (поз. 2, рисунок 20).
Дождаться появления на ПУ информации о зарядке конденсаторов боевой цепи до напряжения 19…20В.
Проверить прохождение команды на включение боевой цепи, для чего двумя руками одновременно нажать на кнопки «ПУСК» (поз. 2 и 4, рисунок 21). Светодиоды имитатора срабатывания боевых цепей должны кратковременно засветиться. На ПУ напряжение на конденсаторах должно снизиться до значения близкого к «0»;
— вернуть ключ (поз. 5, рисунок 21) в исходное положение, при этом напряжение на конденсаторах должно снизиться до значения близкого к «0», а наличие вспышки на имитаторах БЦ 1 и БЦ 2 не допускается.
3.4. Использование МРК
3.4.1. Типовые режимы работы МРК
3.4.1.1. Управление транспортным средством
Перевести тумблер «РАБОТА» на ПУ (поз. 28, рисунок 21) в верхнее положение, при этом должен загореться индикатор.
Для движения МР вперед (назад) отклонить от себя (на себя) левый 2-х координатный джойстик с нажатой кнопкой (поз. 26). При этом мотор-звездочки вращаются в одном направлении, МР движется прямолинейно вперед или назад.
Для поворота МР отклонить левый джойстик с нажатой кнопкой в сторону поворота. При этом мотор-звездочки вращаются с различной угловой скоростью в одном или в разных направлениях. Для поворота МР на месте отклонить джойстик с нажатой кнопкой вправо или влево.
Скорость прямолинейного движения и поворота МР можно плавно регулировать от минимального до максимального значения в зависимости от величины отклонения ручки джойстика управления. Минимальному отклонению ручки джойстика управления соответствует минимальная скорость.
Перед началом прямолинейного движения МР рекомендуется:
— по монитору выбрать (при возможности) на местности ориентир, в направлении которого будет двигаться МР, выставить одну из обзорных камер ТК1, ТК2 или ТК6 вдоль продольной оси МР и довернуть МР в сторону ориентира;
— при движении вперед навести ОТУ1 или ОТУ2 на участок местности в (2-5) м от передней части МР в направлении движения, при движении задним ходом обзорную камеру навести так, чтобы иметь возможность контролировать положение кабеля (при управлении по кабелю), во избежание наезда на кабель;
— расположить манипулятор вдоль продольной оси МР, схватом назад;
— начать движение, плавно увеличивая скорость.
Скорость движения выбирать в зависимости от условий эксплуатации.
По возможности, для поворота МР следует использовать ровные горизонтальные участки с твердым грунтом или вершины (гребни) неровностей. При поворотах гусеницы необходимо приподнять, чтобы уменьшить сопротивление повороту
При движении по щебенке, гальке, снегу, песку, рыхлому грунту, глубокой колее производить минимальное количество поворотов, особенно крутых, во избежание забивания беговой дорожки грунтом, что может привести к спаданию гусениц или перегрузке двигателей мотор-звездочек.
В этих случаях поворот следует осуществлять ступенчато:
— повернуть МР на небольшой угол;
— продвинуть на (0,5-1) м вперед;
— снова повернуть и т.д.
При преодолении пороговых препятствий (вертикальной ступени, эскарпа, бордюра, шпалы и т.п.) рекомендуется расположить МР так, чтобы его продольная ось была перпендикулярна препятствию. При въезде на препятствие гусеницы слегка приподнять.
Въезд на препятствие производить на минимальной скорости и остановить МР сразу после начала переваливания (как только поплыло изображение на мониторе). Продолжать движение только после соприкосновения гусениц с поверхностью площадки.
На крутой (свыше 15°) подъем (с крутого спуска) с резким изломом въезжать (съезжать) на минимальной скорости, во избежание «клевка» и удара МР о поверхность площадки. Скорость увеличивать только после проезда МР через излом. Для увеличения устойчивости МР гусеницы опустить до поверхности движения.
Поворотов на крутом спуске следует избегать. Если это невозможно – поворачивать МР плавно (с минимальной скоростью). Повороты на большой угол (свыше 20°) выполнять ступенчато, при этом следить, чтобы не началось сползание МР юзом. Если сползание началось, остановить МР и повернуть в сторону спуска.
При движении по косогору и лестнице рекомендуется развернуть манипулятор в сторону подъема и установить схват в положение максимального удаления от оси вращения манипулятора. На крутых косогорах двигаться тем медленнее, чем круче косогор, стараться избегать поворотов в сторону подъема, для компенсации увода МР в сторону спуска рекомендуется двигаться слегка на подъем.
При движении вниз по лестнице с грузом рекомендуется развернуть манипулятор в сторону подъема и установить схват в положение максимального удаления от оси вращения манипулятора.
Участки с тяжелым грунтом (жидкая грязь, мелкий сухой песок, глубокий снег) или залитые водой преодолевать наикратчайшим путем, совершая минимальное количество поворотов. В случае начала буксования отъехать назад по колее и двигаться в объезд.
3.4.1.2. Управление телевизионной системой
При включении ПУ на экране монитора появляется изображение с телекамеры ТК-1, входящей в состав ОТУ1, при этом постоянно светится индикатор выбранной телекамеры, что свидетельствует о том, что ручка джойстика находится в режиме управления данной телекамеры.
Для управления двухкоординатным механизмом наведения телекамер необходимо включить тумблер «РАБОТА» (поз. 16, рисунок 21) и тумблер «ПРИВОД НАВЕДЕНИЯ ТК» (поз.15) (режим «включено»);
Управление ОТУ1 производится с помощью правого пропорционального 2-х координатного джойстика с кнопкой. При отклонении ручки джойстика (поз. 18, рисунок 21) от себя (на себя) “картинка” на экране “ползет” вниз (вверх). При отклонении ручки джойстика влево (вправо) телекамера разворачивается по (против) часовой стрелки.
Скорость перемещения телекамер плавно регулируется от минимального до максимального значения в зависимости от величины отклонения ручки джойстика управления.
Для работы с трансфокатором необходимо перевести тумблер «ZOOM» (поз. 17, рисунок 21) вверх (вниз) для приближения (удаления) рассматриваемого изображения.
В ОТУ1 используется ТВ-камера, которая в режиме по «умолчанию» работает в режиме автофокусировки, а при необходимости может быть переведена в режим ручной фокусировки, с помощью тумблера «ФОКУС» (поз. 14, рисунок 21).
Ручная фокусировка осуществляется путем изменения положения тумблера (вверх-вниз), в результате чего можно добиться наилучшей резкости наблюдаемого объекта.
В режиме ручной фокусировки возможен переход на автоматическую фокусировку с сохранением режима ручной фокусировки. Для этого необходимо кратковременно нажать тумблер «ZOOM».
Для работы с ОТУ2 перевести тумблер (поз. 24, рисунок 21) на панели «ТЕЛЕВИДЕНИЕ» в положение «2», при этом должен начать светиться индикатор в постоянном режиме, что свидетельствует о том что ручка джойстика (поз.18, рисунок 21) переведена в режим управления ОТУ2. При этом появляется изображение в основном окне монитора с телекамеры «ТК2», установленной в ОТУ2.
Аналогично выбираются и телекамеры ТК3, ТК5 и ТК6.
Для работы с дополнительными телекамерами подключаемыми на распределительной коробке манипулятора и панели управления МР перевести тумблер (поз. 19, рисунок 21) в положение «ТК4». При этом начнет светиться индикатор и появится изображение в основном окне экрана монитора.
Внимание! Одновременное подключение двух дополнительных телекамер к разъемам ТК-4 не допускается.
3.4.1.3. Погрузочно-разгрузочные работы с помощью манипулятора
Если манипулятор находится в транспортном положении его необходимо развернуть в рабочее положение. Для этого нужно на панели «Выбор меню команд» перевести тумблер (поз.10, рисунок 21) в позицию 5, при этом на дисплее панели управления появится соответствующее «МЕНЮ 5» из 4-х строк. Выбор команды «Рабочее положение ПМ» производится нажатием соответствующей кнопки напротив названия команды (поз.12).
При работе с манипулятором перевести тумблер «РАБОТА» (поз. 16, рисунок 21) в положение «ВКЛ», при этом должен начать светиться индикатор.
Для работы с плечом перевести тумблер (поз.21) на панели «ВЫБОР ГРУППЫ ПРИВОДОВ» в положение «6», при этом должен начать светиться индикатор. Для подъема (опускания) плеча отклонить на себя (от себя) ручку правого джойстика (поз. 18). Для поворота плеча по (против) часовой стрелке отклонить влево (вправо) ручку правого джойстика (поз. 18). Для работы с предплечьем перевести тумблер (поз. 22) на панели «ВЫБОР ГРУППЫ ПРИВОДОВ» в положение «2», при этом должен начать светиться индикатор. Для подъема (опускания) предплечья манипулятора отклонить на себя (от себя) ручку правого джойстика (поз. 18). При работе с конечным звеном манипулятора (кистью) перевести тумблер (поз.21) на панели «ВЫБОР ГРУППЫ ПРИВОДОВ» в положение «3», при этом должен начать светиться индикатор. Для подъема (опускания) кисти манипулятора отклонить на себя (от себя) ручку правого джойстика (поз. 18). Для ротации схвата кисти по (против) часовой стрелке отклонить вправо (влево) ручку правого джойстика (поз. 18).
Скорость подъема (опускания) звеньев и поворота манипулятора можно плавно регулировать от минимального до максимального значения, в зависимости от величины отклонения ручки правого джойстика (минимальному отклонению соответствует минимальная скорость).
При нажатии на кнопку джойстика можно работать со схватом при любом включенном звене манипулятора. Охватить груз губками схвата как можно ближе к центру масс и произвести закрытие схвата отклоняя ручку правого джойстика на себя (от себя). Величина усилия сжатия кисти будет пропорциональна углу отклонения ручки джойстика. В МР схват отключается автоматически при зажатии детали до установленного нормируемого усилия 800 или 1000 Н. При этом предусмотрена механическая защита.
При работе с манипулятором оператору необходимо учитывать следующее:
— если масса груза близка к предельно допустимой (30 кг), подъем звеньев и поворот манипулятора выполнять с минимальной скоростью и амплитудой;
— длинные тяжелые предметы рекомендуется захватывать за среднюю часть, при манипуляциях такими предметами – избегать ударов о МР.
Постоянно установлены в схвате манипулятора прямые губки с колодкой (поз. 7, рисунок 12), которые обеспечивают захват рабочего оборудования и плоских предметов.
Внимание! При повороте манипулятора необходимо следить за тем, чтобы манипулятор и груз не задевали за элементы конструкции МР.
Зона обслуживания манипулятора определяется величиной вылета манипулятора – 1,5 м и ограничениями накладываемые конструктивными элементами МР. Для предотвращения наезда звеньев манипулятора на элементы конструкции МР и друг на друга введены зоны запрета для работы манипулятора, при достижении которых запрещаются движения в определенных направлениях, а разрешены только в обратную сторону.
3.4.1.4. Транспортирование грузов и проведение специальных работ
Управление МР при транспортировании грузов в схвате манипулятора осуществлять аналогично описанному в п. 3.4.1.1 настоящего руководства. При этом необходимо учитывать, что нагруженный МР более склонен к опрокидыванию на крутых спусках и к застреванию на участках с тяжелым грунтом.
При использовании дополнительного технологического оборудования возможно проведение с помощью МР специальных работ. Действия оператора при проведении таких работ изложены в разделе 3.4.2 руководства по эксплуатации
3.4.1.5. Проведение разведывательных работ
Управление МР при проведении разведывательных работ осуществлять аналогично описанному в п.п. 3.4.1.1 и 3.4.1.2 настоящего РЭ. При этом необходимо постоянно отслеживать положение МР (по ориентирам на местности).
Маршрут движения МР следует наносить на план (схему, фотографию и т.д.) местности.
Визуальная разведка производится с использованием телевизионной системы МР.
Для определения опасных фактор на борту МР установлены температурные датчики (поз.13 , рисунок 1), датчики крена-дифферента, блок детектирования гамма-излучения БДМГ-36 (поз.14) и газоанализатор ГСА-3 (поз.15). Информация с них отображается в графическом окне монитора панели управления ПУ (поз. 3, 4, 5, и 6, рисунок 20). Использование данных датчиков и приборов в соответствии с их эксплуатационной документацией.
3.4.1.6. Работа МРК при управлении по кабелю
Управление по кабелю МРК осуществляется с ПУ. Переход на управление с радиоканала на кабель и обратно производится автоматически после выключения МР и подключения катушки с кабельной линией управления к МР и ПУ. Порядок подготовки, включения и управления в режимах по «Радио» и по «Кабель» изложен в разделе включения МРК подразделы 3.3.3 и 3.3.4 настоящего РЭ.
Порядок управления МРК в режиме работы по кабелю аналогичен режиму управления по радиоканалу.
При движении задним ходом обзорную камеру навести так, чтобы иметь возможность контролировать положение кабеля во избежание наезда на кабель.
3.4.2. Порядок работы с дополнительным оборудованием
Дополнительное оборудование транспортируется к месту проведения работ в штатной упаковке – чемоданах, ящиках или размещены в АБР-РОБОТе или другом автомобиле сопровождения.
3.4.2.1. Работа с комплектом сменных губок
Основой комплекта являются губки схвата прямые с колодкой (поз. 7, рисунок 12), которые постоянно установлены в схвате манипулятора и обеспечивают захват рабочего оборудования и плоских предметов.
При необходимости выполнения работ по захвату мелких предметов, расположенных в щелях шириной 20 мм и более и глубиной до 200 мм и отверстиях диаметром 40 мм и более, овальных предметов размером до 160 мм, а также цилиндрических предметов диаметром от 50 до 200 мм, необходимо использовать специальные губки из комплекта (рисунок 26):
— узкие удлиненные губки для захвата мелких предметов, расположенных в щелях шириной 20 мм и более и глубиной до 200 мм и отверстиях диаметром 40 мм и более (поз. 2);
— губки типа грейфер с диаметром внутренней полости 160 мм (поз. 1);
— губки для захвата цилиндрических предметов диаметром от 50 до 200 мм (поз. 3).
Замену губок из комплекта производить следующим образом:
— развести губки в схвате манипулятора;
— нажать на рычаг фиксатора (поз. 10, рисунок 12) и снять губки прямые;
— вынуть из штатной упаковки необходимые для проведения данного вида работ губки, протереть ветошью места присоединения губок с колодкой и установить их на место;
— проверить надежность фиксации губок в колодке;
— уложить снятые губки на штатное место в упаковке;
Проверить функционирование губок. После этого губки готовы к работе.
3.4.2.2. Работа с зарядными устройствами
Зарядку эксплуатируемых аккумуляторных батарей необходимо проводить, используя штатные кабели ЗУ.
Перед использованием ЗУ проверить их на функционирование в следующем порядке:
— подключить вилки (поз. 8, рисунок 24) зарядных устройств к сети переменного тока 220 В;
— последовательно замкнуть проводниками контакты разъемов или подключить к контактам автомобильную лампу накаливания на 55-110 Вт и вращая по часовой стрелке регулятор силы тока убедиться, что ток регулируется, а яркость свечения лампы меняется:
а) к контактам 1 и 2 разъема (поз. 7) ЗУ (“ Орион PW260” или “ ОрионPW265”);
б) к контактам 1 и 2 разъема (поз. 9) ЗУ (“ Орион PW320” или “ Орион PW325”);
в) к контактам 3 и 2 разъема (поз. 9) ЗУ (“ Орион PW320” или “ Орион PW325”).
— отключить вилки (поз. зарядных устройств от сети переменного тока 220 В;
Зарядку МР производить, используя два зарядных устройства “Орион PW320” или“ОрионPW325” в следующей последовательности:
— подключить разъем кабеля зарядного устройства (поз. 9, рисунок 24) к разъему « Зарядка» (поз. 7, рисунок 27) МР;
— вращая регуляторы силы тока (поз. 3, рисунок 24) против часовой стрелки, установить их на обоих зарядных устройствах (поз. 2) в крайнее левое положение (минимальный ток);
— подключить вилки (поз. зарядных устройств к сети переменного тока 220 В;
— вращая регуляторы силы тока (поз. 3) по часовой стрелке, установить ток заряда в пределах 6 — 9 А, а при ускоренном заряде – 15 А.
При ускоренном заряде необходимо постоянно контролировать газовыделение, не допуская «закипания» аккумуляторов.
Сила тока устанавливается регулятором плавно. Заряд будет проходить в автоматическом режиме током, установленным ручкой регулировки. При достижении на аккумуляторной батареи напряжения, равного 14,6 В, ток автоматически уменьшается, зарядное устройство переходит в буферный режим, при котором саморазряд аккумуляторной батареи компенсируется требующимся током заряда.*
По окончании заряда отключить зарядное устройство от сети и отсоединить разъем «Зарядка» от МР.
* Самопроизвольное уменьшение тока в начале заряда может свидетельствовать о наличии сульфатации пластин аккумуляторной батареи. Уменьшив ток, зарядное устройство автоматически переходит в режим десульфатации аккумуляторной батареи. В зависимости от степени поражения пластин, на десульфатацию может потребоваться от нескольких минут до нескольких часов. В процессе десульфатации ток постепенно автоматически возрастет до значения выставленного регулятором тока.
Зарядку блока питания ПУ производить, используя штатное зарядное устройство или зарядное устройство “ Орион PW260” или “ Орион PW265” в следующей последовательности:
— подключить разъем кабеля (поз. 7) зарядного устройства «Зарядка ПУ» к разъему блока питания ПУ.
Порядок работы с зарядным устройством изложен выше при этом необходимо установить ток заряда не более 3А.
Время зарядки полностью разряженного источника питания: МР не менее 10 часов, ПУ – не менее 5 часов.
Использование зарядного устройства в качестве источника питания.
Зарядное устройство является источником стабилизированного напряжения постоянного тока с ограничением (стабилизацией) силы тока нагрузки и поэтому может быть применено для запитки любых потребителей тока напряжением 14,6 В с суммарным током потребления меньше выставленного ручным регулятором тока. При перегрузке, либо аварийном замыкании выходных проводов, зарядное устройство переходит в режим стабилизации тока.
При работе ПУ от сети переменного тока 220В 50, Гц ЗУ подключается в гнездо блока питания ПУ при этом выставляется ток не менее 3А (при включенном мониторе 6А). Порядок работы с ЗУ изложен выше.
Внимание! При зарядке аккумуляторов возможно образование взрывоопасной смеси. Зарядку проводить в хорошо проветриваемом помещении. Зарядку аккумуляторов МР проводить только при снятой крышке аккумуляторного отсека.
3.4.2.3. Работа с технологическим пультом управления
Для проведения работ с технологическим пультом управления (рисунок 25) произвести подготовку его к работе в следующем порядке:
— вынуть из штатной упаковки технологический пульт управления и протереть мягкой чистой ветошью;
— снять транспортную заглушку с разъема «Пульт» (поз. 1, рисунок 27) на лицевой панели МР;
— подсоединить кабель к разъему «Пульт» МР;
— включить МР, для чего установить на панели управления МР тумблер «Питание» (поз. 2) в верхнее положение, при этом должны начать светиться индикаторы степени зарядки аккумуляторных батарей (поз. 3, 8 и 9) на панели АБ мобильного робота и загореться все индикаторы на технологическом пульте управления, а затем погаснуть кроме одного;
— выбрать привод согласно рисунка на технологическом пульте управления нажатием кнопки, при этом выбранная кнопка подсветится;
— выполнить движения выбранным приводом, используя ручку управления на технологическом пульте управления. Управление ручкой пропорциональное – большее отклонение соответствует большей скорости перемещения привода.
3.4.2.4. Работа с установкой пожаротушения тонкораспыленной водой
Для проведения работ с использованием установки пожаротушения тонкораспыленной водой УПТВ-50, катушка с рукавом высокого давления навешивается на МР (поз. 1, (рисунок 29), распылитель поз. 1 (рисунок 30) устанавливается на звене манипулятора и они подключаются к клапанной коробке поз. 3 (рисунок 29). Клапанная коробка подключается к разъему поз. 4.
2
3
4
1
Рисунок 29
1
Рисунок 30
Укладка шланга по манипулятору показана на рисунке 31.
Рисунок 31
Порядок работы с УПТВ-50 в ее руководстве по эксплуатации.
Для включения подачи воды на ПУ тумблером «ВЫБОР МЕНЮ КОМАНД» выбрать «3», в графическом окне монитора панели управления ПУ отобразятся команды «Меню 3».
Нажать кнопку напротив команды «Подача воды». Визуально наблюдать исполнение команды на МР. Управляю манипулятором направить струю на объект. Для изменения распыла струи нажать кнопку напротив команды «Компактная струя». Для отмены команд повторно нажать соответствующие кнопки.
Для охлаждения МР на клапанной коробке установлен распылитель (поз. 2 рисунок 29). Для включения режима охлаждения МР необходимо тумблером «ВЫБОР МЕНЮ КОМАНД» выбрать «2» и нажать кнопку напротив команды «Орошение». Визуально наблюдать исполнение команды на МР.
3.4.2.5. Работа с модулем водопенного пожаротушения
Порядок заправки водопенного модуля согласно инструкции по его эксплуатации. Модуль навешивается на МР (рисунок 32). Подключение модуля и работа с ним в составе МР согласно п. 3.4.2.4.
Рисунок 32
3.4.2.6. Работа с модулем порошкового пожаротушения
Порядок заправки порошкового модуля и соблюдения правил техники безопасности согласно инструкции по его эксплуатации. Модуль навешивается на МР (рисунок 33). Пиропатрон подключается кабелем к разъему «Оружие» (рисунок 27).
Рисунок 33
Внимание ! Подключение проводить строго в следующей последовательности:
— свободные концы кабеля скруткой подключить к пиропатрону;
— при выключенном МР и выключенном тумблере (в нижнем положении) (поз. 10, рисунок 27) подключить кабель к разъему «Оружие»;
— включить МР;
— перевести тумблер в верхнее положение «I».
Для активации порошкового модуля необходимо на ПУ повернуть ключ «СПЕЦСРЕДСТВА» в положение «С2». Начнется зарядка боевых конденсаторов. Процесс зарядки контролировать по показаниям окна «Конденсаторы» (поз. 2, рисунок 20). При достижении значения зарядки 19…20В боевая цепь готова к работе. Нажатием двух тумблеров «ПУСК» (поз. 2 и 4, рисунок 21) инициировать порошковый модуль. Перед активацией МР повернуть в сторону объекта.
Вместо распылителя (поз. 1, рисунок 33) может устанавливаться успокоитель в схвате манипулятора и с помощью шланга подключаться к порошковому модулю. В зависимости от применяемого типа распылителя («елочка» или успокоитель) применяются различные марки порошков.
3.4.2.7. Работа с пеногенератором
Пеногенератор ГПВК устанавливается в схвате манипулятора (поз.1, рисунок 34).
1
Рисунок 34
С помощью шланга подключается к фланцу переходнику, закрепленном на МР (рисунок 35).
Рисунок 35
Подача раствора пенообразователя на пеногенератор осуществляется от внешнего источника по рукавной линии. В качестве внешнего источника может использоваться пожарный автомобиль, оснащенный пенно-баком и системой дозирования пенообразователя. Рабочее давление на пеногенераторе должно быть в диапазоне 4÷8 атм. при расходе 1л/с. Применяемый пенообразователь по своим характеристикам обеспечивает получение высокократной пены (более 200).
Направление подачи струи пены производится с помощью команд подаваемых на исполнительные механизмы манипулятора.
3.4.3. Возможные неисправности и способы их устранения
Перечень возможных неисправностей и способы их устранения приведены в таблице 4.
Таблица 4
Возможная
неисправность
Вероятная причина Способ устранения При-
мечание
1. МР не выполняет команды ПУ 1.1 Не включено питание МР или ПУ. 1.1 Перевести тумблеры МР (поз. 2, рисунок 27) и ключ питания ПУ (поз.1, рисунок 21) в положение “Включено”. 1.2 Разряжены аккумуляторные батареи МР или ПУ. 1.2 Зарядить аккумуляторные батареи МР и ПУ. 1.3 Не установлена приёмная антенна ДУ (поз.4, рисунок 2) на МР 1.3 Установить приёмную антенну ДУ на МР 2. Самопроизвольное отключение МРК.
2.1 Нарушены контактные соединения в разъёмах МР и ПУ. 2.1 Проверить контактные соединения в разъёмах МР и ПУ. 2.2 Разряжены аккумуляторные батареи ПУ или МР. 2.2 Проверить аккумуляторные батареи и при необходимости зарядить или заменить. 3. Отсутствует видеоизображение на дисплее ПУ 4.1 Разряжены аккумуляторные батареи МР. 4.1 Проверить аккумуляторные батареи и при необходимости зарядить или заменить. 4.2 Нет контакта в разъемах подключения телекамер 4.2 Проверить правильность подключения разъемов. 4. Сброс гусеницы 5.1 Попадание посторонних предметов в гусеницу 5.1 При первых признаках сброса гусеницы оператор обязан прекратить разворот и, по возможности, дать МР прямолинейное движение вперед — назад, чтобы гусеница встала на место. 3.4.4. Порядок выключения МРК
3.4.4.1. Установить все органы управления на ПУ в положение, описанное в подразделе 3.3.3 настоящего руководства.
3.4.4.2. Выключить ПУ поворотом ключа «Питание» (нажатием кнопки) (поз. 1, рисунок 21).
3.4.4.3. Выключить МР, для чего установить тумблер «Питание» (поз. 2, рисунок 27), расположенный на панели управления ТС, в нижнее положение.
4. Техническое обслуживание изделия
4.1. Общие указания
В процессе использования изделия по назначению необходимо проводить ежедневное техническое обслуживание (ЕТО) и контрольный осмотр (КО).
Техническое обслуживание (ТО) изделия проводить в объеме, указанном в настоящем РЭ, при отключенном питании.
При эксплуатации МРК содержать в чистоте, оберегать сборочные единицы от ударов. Загрязненные поверхности МР и аппаратуры ПДУ очищать водой или моющими средствами. Протирку неметаллических поверхностей производить чистой ветошью, смоченной в воде или в растворах синтетических моющих средств. При необходимости нанесения новой смазки, старую смазку удалить ветошью, смоченной в бензине ГОСТ 2084-77.
Следить за наличием влаги в корпусе МР. При ее появлении снять крышки, удалить влагу ветошью и просушить МР в теплом помещении.
Элементы оптики телекамер протирать только чистой фланелевой или батистовой тряпкой, смоченной в этиловом спирте ГОСТ Р51652-2001.
При хранении МРК производить техническое обслуживание МРК через 2,5 года.
Техническое обслуживание МРК проводит персонал, работающий на данном МРК и прошедшие специальную подготовку или специалисты, изучившие конструкцию изделия и настоящее РЭ и получившие разрешение на проведение ТО.
4.2. Меры безопасности
Все работы по техническому обслуживанию МРК должны осуществлять только лица, допущенные к работе с МРК и прошедшие инструктаж по технике безопасности.
На месте проведения ТО должны соблюдаться меры электро- и пожаробезопасности.
ТО должны проводиться бережно и аккуратно, исключая при этом соударения, поломки, вмятины на обслуживаемых блоках.
ТО проводить исправным инструментом, а при работе с маслом – в защитных перчатках.
Запрещается использование растворителей для протирки пластмассовых панелей и деталей изделия.
Запрещается проведение самостоятельного вскрытия корпусов и ремонта узлов и механизмов изделия.
Не допускается производить зарядку автономных источников питания без присмотра. Перед зарядкой все тумблеры питания должны быть переведены в положение “Выкл.”.
Во время зарядки автономных источников питания запрещается производить ремонтные и профилактические работы, а также проверять работоспособность изделия.
Соблюдать осторожность при работе с зарядными устройствами, так как при включённом состоянии в них имеется опасное для жизни напряжение ~ 220 В, 50 Гц. Во избежание несчастных случаев категорически запрещается включать зарядные устройства при снятых крышках.
Запрещается производить любые перестыковки кабелей при включенном МРК.
При проверке функционирования МРК запрещается находиться ближе двух метров от МР.
4.3. Порядок и виды технического обслуживания МРК
4.3.1. Ежедневное техническое обслуживание
Ежедневное техническое обслуживание (ЕТО) осуществлять после окончания работы с МРК. Трудоемкость ЕТО – 1 человеко-час.
Объем проверок изделия при проведении различных видов ТО при эксплуатации представлен в таблице 5.
Таблица 5
Виды работ при техническом
обслуживании Виды и периодичность технического обслуживания
ЕТО Через каждые 50 часов
(3 месяца) Через каждые 100 часов
(6 месяцев) Через каждые 500 часов
(2,5 года)
1. Очистка изделия от грязи и пыли, протирка насухо. Проверка наличия влаги в корпусе МР, при ее появление удалить протиркой и просушить. 2. Протирка оптических устройств. 3. Осмотр крепежных соединений. 4. Проверка сохранности кабелей и разъемов 5. Контроль заряда аккумуляторных батарей (АИП) и их подзарядка. 6. Проверка крепления и затяжка ослабленных резьбовых соединений двигателей, редукторов и шасси. 7. Замена смазки трущихся поверхностей 8. Проверка целостности элементов гусениц 9. Проверка и регулировка защитных муфт 10. Регулирование цепных передач манипулятора 11. Восстановление защитно-декоративного покрытия.
12. Замена аккумуляторных батарей (АИП)
Все наружные поверхности изделия по окончании рабочего процесса необходимо тщательно промыть до полного удаления пыли, песка и грязи, после чего протереть насухо и высушить на воздухе в течение 2 – 3 часов.
Затяжку резьбовых соединений производить только с помощью инструмента, не допуская срывов резьбы.
Для предотвращения сокращения срока службы рекомендуется постоянно следить за техническим состоянием изделия.
4.3.2. Контрольный осмотр
Контрольный осмотр (КО) МРК проводить ежедневно после ЕТО согласно подраздела 4.3.1 настоящего РЭ. Трудоемкость КО – 0,5 человеко-час.
4.3.2. Техническое обслуживание при хранении
При хранении МРК через 2,5 года производить визуальный контроль состояния МРК, при этом устранять обнаруженные следы коррозии и возобновлять смазку.
При обнаружении во время осмотра МРК значительных повреждений (вмятин, следов коррозии и т.д.) или в случае отклонения условий хранения от заданных в разделе 5 настоящего РЭ, необходимо произвести расконсервацию МРК и проверку его функционирования. Устранить выявленные недостатки или обратиться в ремонтную организацию.
4.4. Проверка работоспособности МРК
Собранный после проведения ремонта МРК необходимо проверить на функционирование согласно подразделу 3.3.6 настоящего руководства.
4.5. Консервация (расконсервация, переконсервация)
4.5.1. Расконсервация
4.5.1.1. Чистой х/б ветошью удалить смазку с открытых поверхностей штоков электромеханизмов МР и деталей механизмов натяжения, совершающих поступательное движение.
4.5.1.2. Чистой х/б ветошью обтереть ПУ, монитор, антенны и кабели.
4.5.1.3. Металлические части ПУ, антенн и кабелей, покрытые смазкой, промыть бензином Б-95/130 или Б91/115 ГОСТ 1012-72.
4.5.1.4. Снять с соединителей транспортировочные крышки.
4.5.1.5. Промыть соединители спиртом-ректификатом ГОСТ 18300-87.
4.5.1.6. При обнаружении нарушений лакокрасочного покрытия их устраняют подкраской эмалью МЛ-165 ГОСТ 12034-77 исходного цвета.
4.5.2. Консервация (переконсервация)
4.5.2.1. Кабельные и блочные части соединителей очистить (при необходимости) от влаги, грязи, посторонних предметов и промыть спиртом-ректификатом. Первые 2-3 витка резьбовых частей соединителей покрыть тонким слоем смазки ГОИ-54П ГОСТ 3276-89, после этого на соединители до упора навинтить транспортировочные крышки. Попадание смазки на электрические контакты соединителей не допускается.
4.5.2.2. Удалить конденсированную влагу, пыль, грязь с поверхностей, указанных в п. 4.5.2.1 и нанести на них тонкий слой смазки ГОИ-54П.
4.5.2.3. На металлические части ПУ нанести тонкий слой смазки ГОИ-54П.
4.5.2.4. Переконсервацию МРК проводить по мере необходимости, но не реже одного раза в год. Проводят расконсервацию и затем консервацию МРК.
4.5.2.5. После проведения расконсервации или консервации (переконсервации) МРК необходимо сделать соответствующую запись в формуляре.
4.6. Перечень основных и дублирующих ГСМ, применяемых в изделии
Основным ГСМ, применяемым в изделии, является смазка Литол 24 ГОСТ 21150-87. Дублирующим эквивалентом может служить масло смазочное ОКБ-122-7 ГОСТ18179-72.
5. Хранение
Перед постановкой на хранение необходимо провести техническое обслуживание МРК согласно разделу 4.6 настоящего РЭ.
Аккумуляторы хранить отдельно в соответствии с требованиями на аккумуляторы.
Хранение МРК производить в отапливаемых помещениях при температуре окружающего воздуха от +5 до +40°С и относительной влажности воздуха до 85% при температуре +20°С.
Резкие перепады температуры и влажности не допускаются. В помещениях для хранения не должно быть пыли, паров кислот и щелочей, агрессивных газов и других вредных примесей, вызывающих коррозию.
Срок хранения МРК 2 года.
Периодичность технического обслуживания во время хранения 1 год.
Периодичность технического обслуживания аккумуляторов МР и ПУ во время хранения – в соответствии с нормативно-технической документацией на них.
6. Транспортирование
6.1. При транспортировании МРК должны быть обеспечены следующие условия:
— максимальная температура воздуха не выше +50°С;
— минимальная температура воздуха не ниже минус 40°С;
— относительная влажность воздуха (при +25°С) не выше 98 %.
6.2. Перед погрузкой на транспортное средство манипулятор должен находиться в транспортном положении.
МР, ПУ и ящики с устройствами должны быть закреплены на транспортном средстве таким образом, чтобы исключалась возможность их смещения и соударения.
Гусеницы МР должны быть зафиксированы упорами. Дополнительно МР должен быть закреплен растяжками.
6.3. При транспортировании МРК следует укрыть брезентом для предохранения от дождя, снега, пыли и т.п.
6.4. Транспортирование МРК может осуществляться:
— авиационным, железнодорожным, водным транспортом без ограничения дальности и скорости;
автомобильным транспортом по шоссе с асфальтобетонным покрытием со скоростью до 80 км/ч.
6.5. Погрузку, крепление и перевозку МРК осуществлять в соответствии с правилами, действующими на данном виде транспорта.
7. Гарантийные обязательства
Изготовитель гарантирует безотказную работу МРК-РП при соблюдении правил эксплуатации, технического обслуживания и хранения, изложенных в настоящем руководстве по эксплуатации.
Гарантийный срок эксплуатации – 24 месяца с момента поставки изделия Заказчику или в течении 200 часов наработки.
Ремонт МРК производит предприятие-изготовитель.
Дата ввода в эксплуатацию:
(подпись ответственного лица)
Подборка по базе: ПОВЫШЕНИЕ ЭФФЕКТИВНОСТИ ЭКСПЛУАТАЦИИ ГОРНЫХ МАШИН НА ПРИМЕРЕ ОБО, 26. Экспертиза ПБ при эксплуатации оборудования, работающего под, Организация эксплуатации пожарной и аварийно-спасательной техник, Тема №4.6 Ручные пожарные лестницы. Назначение, устройство, прав, Руководство по эксплуатации СУП-140.docx, Инструкция по охране труда для начальника отдела безопасности эк, таблица Лидерство и руководство.docx, Инструкция по эксплуатации ВАЗ 2101.pdf, ПОЖАРНАЯ И АВАРИЙНО-СПАСАТЕЛЬНАЯ ТЕХНИКА Организация эксплуатаци, (ДЗ) Изучение особенностей эксплуатации плавсредств вооружения и
ПЛАН-КОНСПЕКТ
проведения занятий с группой ШОМ____ПЧ28______________
Тема: «Изучение новых технологий пожаротушения и проведения аварийно-спасательных работ. Разработки и внедрение робото-технических комплексов (наземных, подводных и воздушных) в системе МЧС России».
ЗАНЯТИЕ 1, 2. Назначение, общее устройство, тактико – технические характеристики, особенности эксплуатации мобильного роботизированного комплекса разведки и пожаротушения МРК-РП, мобильной роботизированной установки пожаротушения МРУП-СП-Г-ТВ-У-40. Основные требования техники безопасности при работе с робото техническими средствами (РТС).
ДАТА:
ВРЕМЯ: 2 учебных часа
ЦЕЛИ ЗАНЯТИЯ:
Закрепление и обновление у обучаемых необходимых знаний о возможностях мобильного роботизированного комплекса разведки и пожаротушения МРК-РП, мобильной роботизированной установки пожаротушения МРУП-СП-Г-ТВ-У-40.
МЕСТО ПРОВЕДЕНИЯ: .
МЕТОД ПРОВЕДЕНИЯ: лекция, практически.
ОСНОВНЫЕ ДОКУМЕНТЫ И ЛИТЕРАТУРА, ИСПОЛЬЗУЕМЫЕ ПРИ РАЗРАБОТКЕ КОНСПЕКТА:
- Комплекс мобильный робототехнический; Руководство по эксплуатации НТ598.00.00.000 РЭ.
- АВТОМОБИЛЬ БЫСТРОГО РЕАГИРОВАНИЯ С ИСПОЛЬЗОВАНИЕМ МОБИЛЬНЫХ РОБОТИЗИРОВАННЫХ КОМПЛЕКСОВ (АБР-РОБОТ ТУ 4854-046-08578307-2006) Руководство по эксплуатации НТ599.00.00.000РЭ.
- ГОСТ Р 54 344-2011 Техника пожарная. МОБИЛЬНЫЕ РОБОТОТЕХНИЧЕСКИЕ КОМПЛЕКСЫ ДЛЯ ПРОВЕДЕНИЯ АВАРИЙНО-СПАСАТЕЛЬНЫХ РАБОТ И ПОЖАРОТУШЕНИЯ Классификация. Общие технические требования. Методы испытаний.
МАТЕРИАЛЬНО-ТЕХНИЧЕСКОЕ ОБЕСПЕЧЕНИЕ:
- видеопроектор – 1 ед.
— автомобиль быстрого реагирования АБР – РОБОТ – 1 ед.
— мобильный роботизированный комплекс разведки и пожаротушения МРК – РП – 1 ед.
1. Термины и определения – 5 минут.
робототехническое средство (РТС) — средство, которое выполняет функции, предписанные виды работ или операции без непосредственного участия человека в опасной зоне.
мобильный робот (МР) — дистанционно управляемое оператором самоходное робототехническое средство.
мобильный робототехнический комплекс (МРК) — совокупность мобильного робота, системы дистанционного управления и средств обеспечения эксплуатации робота.
2. Назначение, общее устройство, тактико – технические характеристики, особенности эксплуатации автомобиля быстрого реагирования АБР-РОБОТ(4326) – 25 минут.
Автомобиль быстрого реагирования для проведения аварийно-спасательных работ и пожаротушения в условиях повышенной опасности с использованием мобильного робототехнического комплекса легкого класса МРК-РП собран на шасси КАМАЗ-4326.
АБР-РОБОТ предназначен для:
— доставки мобильного робототехнического комплекса (МРК) и дополнительного оборудования к месту проведения аварийно-спасательных работ и пожаротушения;
— доставки персонала, способного, обслуживать и управлять робототехническим средством;
— доставки к месту выполнения работ расчета, пожарно-технического вооружения и запаса огнетушащих веществ;
АБР-РОБОТ соответствует климатическому исполнению УХЛ (эксплуатации при температуре воздуха от -40ºС до +40ºС), категории размещения 1 (для эксплуатации на открытом воздухе) эксплуатации в атмосфере типов 1 и 2 (условно чистой и промышленной) по ГОСТ15150 с размещением в период ожидания в помещении с температурой воздуха +5ºС.

Технические характеристики
| 1.2.1. Шасси – КАМАЗ-4326 | |
| 1.2.2. Колесная формула | 4 х 4 |
| 1.2.3. База, мм | 4200 |
| 1.2.4 Двигатель – КАМАЗ-740.31-240 (Евро-3) | |
| 1.2.4.1. Тип двигателя – дизельный с турбонаддувом | |
| 1.2.4.2. Мощность двигателя, кВт (л.с.) | 165(225) |
| 1.2.4.3. Частота вращения при номинальной мощности, мин -1 | 2200 |
| 1.2.5. Напряжение бортовой сети, В | 24 |
| 1.2.6. Тип колес | дисковые |
| 1.2.7. Тип шин – пневматические, с регулируемым давлением | |
| 1.2.8. Размер шин 425/85 R21 (1260[425-533Р) | |
| 1.2.9. Полная масса автомобиля, кг | 11600 |
| 1.2.10. Распределение нагрузки:
— на переднюю ось, кг — на заднюю ось, кг |
5600 6000 |
| 1.2.11. Углы свеса при полной нагрузке, град: | |
| передний – | 36 |
| задний – | 27 |
| 1.2.12. Дорожный просвет при полной нагрузке, мм – | 385 |
| 1.2.13. Максимальная скорость движения, не менее, км/ч | 90 |
| 1.2.14. Габаритные размеры, мм, не более: | |
| — длина | 7630 |
| — ширина | 2490 |
| — высота автомобиля | 3200 |
| Остальные технические характеристики см. в руководстве по эксплуатации изготовителя шасси. | |
| 1.2.15. Число мест боевого расчета | 2+3 |
| 1.2.16. Время подготовки к работе, ч, не более: | |
| — летом | 1 |
| — зимой | 1,5 |
| 1.2.17. Время свертывания, ч, не более | 2 |
Вывозимый пожарный инструмент и аварийно – спасательное оборудование
| № п/п | Наименование | Кол-во |
| 1. | Комплекс мобильный робототехнический легкого класса МРК-РП | 1 шт. |
| 2. | Установка пожаротушения тонкораспыленной водой УПТВ-300 с катушкой навесной и с рукавом высокого давления диаметром 17.4 мм на 50 м. | 1 компл. |
| 3. | Комплект дополнительного оборудования к МРК-РП в составе: | 1 компл. |
| — модуль порошкового пожаротушения вместимостью 50л | 2 шт. | |
| — модуль водопенного пожаротушения вместимостью 50 л. | 2 шт. | |
| — измеритель мощности дозы ИМД-21Б | 1 шт. | |
| — газосигнализатор ГСА-3 | 1 шт. | |
| 4. | ЗИП к МРК-РП в соответствии с ведомостью ЗИП | 1 компл. |
| 5. | Автомобильная УКВ радиостанция | 1 компл. |
| 6. | Носимая УКВ радиостанция | 2 шт. |
| 7. | Сигнальная громкоговорящая система | 1 шт. |
| 8. | Осветительный комплект | 1 шт. |
| 9. | ФОС с АЗУ | 1 шт. |
| 10. | Комплект аварийно-спасательного оборудования принятого в системе МЧС России в составе: | 1 компл. |
| — кусачки КГС-80 | 1 шт | |
| — ножницы комбинированные НКГС-80; | 1 шт. | |
| — расширитель средний РСГС-80; | 1 шт. | |
| — насосная станция СГС-1-80ДХМ; | 1 шт. | |
| — цилиндр двойного действия двухсторонний ЦГС-2/80; | 1 шт. | |
| — насос ручной НРС-2/80; | 1 шт. | |
| — катушка-удлинитель однорядная КУС-1/15 | 1 шт. | |
| 11. | Пеногенератор ГПВК | 1 компл. |
| 12. | Мотопомпа с возможностью водозабора от внешнего источника с производительностью 600 л/мин. | шт. |
| 13. | Огнетушитель ОУ-5 | 1 шт. |
| 14. | Огнетушитель ОП-5 | 2 шт. |
| 15. | Рукав пожарный напорный Dу =51 мм длиной 20 м | 5 шт. |
| 16. | Ствол ручной универсальный комбинированный | 1 шт. |
| 17. | Колонка КПА | 1 шт. |
| 18. | Теплоотражательный костюм ТК-800 | 3 шт. |
| 19. | Специальный костюм «РЗК» | 3 шт. |
| 20. | Специальный костюм «ТАСК-М» | 3 шт. |
| 21. | Дыхательный аппарат «Профи» | 5 шт. |
| 22. | Медицинская аптечка автомобильная | 1 шт. |
| 23. | Медицинская укладка | 1 шт. |
| 24. | Санитарные носилки облегченные | 1 шт. |
| 25. | Знак аварийной остановки | 1 шт. |
| 26. | Противооткатные упоры | 2 шт. |
| 27. | Лопата штыковая | 1 шт. |
| 28. | Кувалда | 1 шт. |
| 29. | Крюк для открывания люков | 1 шт. |
| 30. | Веревка | 1 шт. |
| 31. | Топор | 1 шт. |
| 32. | Лом пожарный с шаровой головкой | 1 шт. |
| 33. | Лом пожарный универсальный | 1 шт. |
| 34. | Трос буксировочный из стального каната грузоподъемностью 8-10 т. | 1 шт. |
| 35. | Канистра для бензина 5 л. | 1 шт. |
| 36. | Ножницы диэлектрические | 1 шт. |
| 37. | Перчатки диэлектрические | 1 пара |
| 38. | Боты диэлектрические | 1 пара |
| 39. | Коврик диэлектрический | 1 шт. |
| 40. | Зажим 80 | 1 шт. |
| 41. | ГП 50х70 | 1 шт. |
| 42. | ГП 50х80 | 1 шт. |
| 43. | ГП 70х80 | 1 шт. |
| 44. | Ключ К-80 | 1 шт. |
| 45. | Ключ К-150 | 1 шт. |
| 46. | Комплект шоферского инструмента | 1 компл. |
Устройство и работа АБР-РОБОТа и его составных частей
АБР-РОБОТ оборудован закрытой цельнометаллической однорядной 3-х местной кабиной (основная кабина) (поз.1) и однорядной 4-х местной дополнительной кабиной «салонного типа» (поз.2), где оборудовано рабочее место оператора МРК.
Основная кабина расположена над двигателем и для обеспечения доступа к нему опрокидывается вперед. Дополнительная кабина расположена непосредственно позади основной кабины и закреплена на надрамнике. Для облегчения опрокидывания основной кабины предусмотрено наличие гидравлического подъемника
На рабочем месте оператора МРК монтируется пульт управления мобильным роботом (МР).
Надстройка (поз.3) предназначена для доставки МР, различных приборов и пожарно-технического вооружения (далее ПТВ) к месту назначения.
Надстройка является конструкцией каркасного типа, установленной на подрамнике и закрепленной на нем с помощью металлорезиновых подушек.
Каркас надстройки, сварен из черного металла и обшит листом из алюминиевого сплава.
Цистерна (рисунок 2) предназначена для перевозки специальных растворов и воды, необходимой для тушения возгораний. Цистерна представляет собой сварную конструкцию из стали со специальным покрытием.
Для наполнения цистерны водой от внешнего источника предназначена горловина с гайкой ГМ50 (поз. 3).
Опорожнение цистерны производится посредством электрического насоса (поз. 2), который подключается к розетке 24В с выключателем (поз. 5).
Для определения уровня содержимого цистерны используется флюдометр (поз. 1), показания которого отображаются на индикаторе (поз. 4).
Из крышки цистерны выходит труба перелива (поз. 6).


Р исунок 2


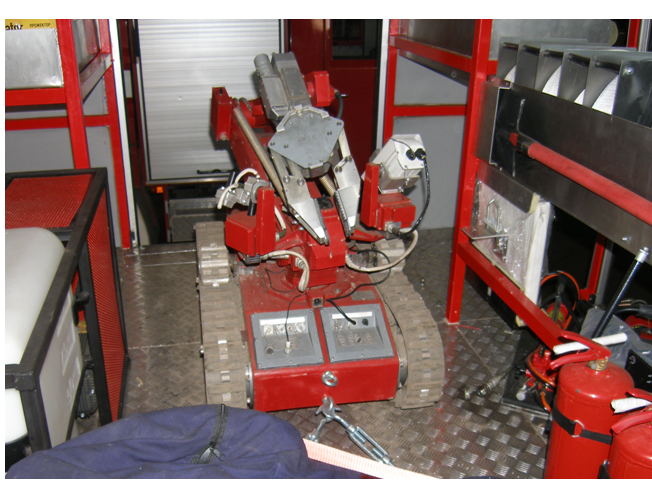

Для погрузки (выгрузки) МР предназначен выдвижной трап (рисунок 12).
Для аварийной загрузки МР в настройке устанавливается ручная лебедка.
на крыше автомобиля размещены:
-трос буксировочный ;
-пеногенератор ГПВК;
— проблесковые маяки.
На дополнительной кабине снаружи (рисунок 13) смонтирована выдвижная стойка поз 1. для крепления антенн и коммутационная коробка поз. 2 с разъемами для подключения антенн.
3. Мобильный роботизированный комплекс разведки и пожаротушения МРК-РП
Назначение МРК
Мобильный робототехнический комплекс разведки и пожаротушения (далее МРК), предназначен для применения при ликвидации последствий аварий, отягощенных химическим и радиационным загрязнением, сопряженных с рисками гибели и травматизма личного состава.
Технические характеристики
| Масса снаряженного МР, не более кг | 190 |
| Максимальная скорость передвижения МР, не менее, км/ч | 3,0 |
| Высота преодолеваемого МР порогового препятствия, м | 0.25 |
| Допустимый угол крена, дифферента МР, не более, градус | 35 |
| Глубина преодолеваемой МР водной преграды, не более, м | 0.1 |
| Глубина преодолеваемого МР снежного покрова, не более, м | 0.1 |
| Номинальная грузоподъемность манипулятора, кг | 30 |
| Предельно допустимая грузоподъемность манипулятора, кг | 50 |
Управление МР с ПУ на расстоянии:
|
200
1000 |
| Габаритные размеры МР, не более, м | |
| Длина | 1.35 |
| Ширина | 0.65 |
| Высота | 0.7 |
| Время непрерывной работы, ч, не менее | 4 |
К основным задачам, которые выполняет МРК-РП, относятся:
-
подача в очаг возгорания огнетушащего вещества от водопенного или порошкового модуля пожаротушения;
-
подача в очаг возгорания тонкораспыленной воды от
АБР-РОБОТ через 50-ти метровую катушку по рукаву высокого давления; -
подача в очаг возгорания воздушно-механической пены низкой кратности от АБР-РОБОТ через 50-ти метровую катушку по рукаву высокого давления или пены высокой кратности через пожарный рукав с использованием генератора пены высокой кратности (ГВП), закрепленного на манипуляторе МРК-РП;
-
проведение аварийно-спасательных работ с применением манипулятора, механического схвата и комплекта сменных губок;
-
проведение разведки в труднодоступных местах с преодолением препятствий (лестничные марши, коридоры, проемы и др.)
Устройство МРК
Мобильный робототехнический комплекс представляет собой набор механизмов, устройств и приспособлений, предназначенных для выполнения оперативно-тактических задач.
Основным элементом МРК является мобильный робот (МР), общий вид которого представлен на рисунке 1. МР представляет собой транспортное средство (поз. 1), внутри корпуса которого размещены: отсек управления с блоками системы управления, бортовая часть канала связи (закрыт крышкой поз. 2) и система энергообеспечения — отсек аккумуляторный (закрыт крышкой поз. 3). На корпусе транспортного средства монтируется манипулятор (поз. 4) и сменное технологическое оборудование, подключаемое к МР на панелях управления (поз. 5).
МР оснащен телевизионной системой, системой освещения и каналом акустической связи.
Все исполнительные механизмы – электромеханического типа с двигателями постоянного тока.
МР управляется в командном режиме с поста дистанционного управления (рисунок 15).
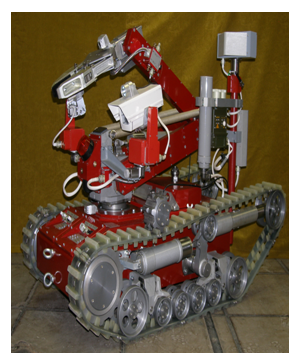
Система дистанционного управления (далее – СДУ) предназначена для дистанционного управления исполнительными механизмами и устройствами, входящими в состав МРК. Управление МР осуществляется по радиоканалу или кабелю в зависимости от условий работы.
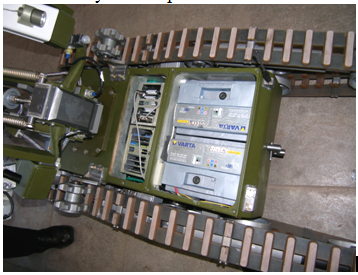
Конструктивно СДУ делится на пультовую и бортовую части.
Пультовая часть СДУ, расположенная в ПУ, предназначена для задания команд управления, формирования командных посылок и преобразования их в код, удобный для передачи по кабелю и радиолинии. Задание команд управления осуществляется с помощью ручек управления, переключателей и кнопок, расположенных на панели управления.
Бортовая часть СДУ, расположенная в корпусе транспортного средства МР, предназначена для приема сигналов управления, поступающих, в зависимости от режима работы, по радиолинии или по кабелю, их обработки, усилению и распределению по соответствующим исполнительным устройствам и механизмам.
Для работы в условиях сложных для прохождения радиоволн (работа в зоне радиотени или работа с постановщиком радиопомех) СДУ снабжена бортовой катушкой с кабелем дистанционного управления, которая устанавливается на стойке в задней части МР (рисунок 12).
Для визуального контроля за работой МР МРК оснащен телевизионной системой.
Телевизионная система
Телевизионная система включает в себя:
— две обзорные телеустановки (ОТУ1, ОТУ2), выполняющие функции наблюдения за окружающей обстановкой;
— одну курсовую ТВ-камеру (ТК5), выполняющую функции наблюдения за дорогой в непосредственной близости от мобильного робота и положением гусениц по отношению к проезжей части дороги и их состоянием;
— одну прицельную ТВ-камеру (ТК3), позволяющую вести наблюдение за работой схвата и наведением рабочего инструмента на исследуемые предметы.
Все обзорные ТВ-камеры (ТК1, ТК2, ТК6), входящие в телеустановки ОТУ1 и ОТУ2,– цветные с широкоугольным объективом. Одна обзорная камера (ТК1) снабжена трансфокатором, позволяющим производить приближение (увеличение) изображения.
Обзорные ТВ-камеры (ТК1, ТК2, ТК6) установлены на двухстепенные механизмы наведения, позволяющие вести практически круговое наблюдение. Механизмы наведения ОТУ1 и ОТУ2 одинаковые, обеспечивают плавное пропорциональное (в зависимости от угла отклонения джойстика на пульте управления) изменение скорости наведения ТВ-камер – в вертикальной и горизонтальной плоскостях.
Максимальная скорость наведения ТВ-камер (ТК1, ТК2, ТК6) по горизонту и вертикали составляет 10º/с.
Курсовая ТВ-камера (ТК5) – цветная с широкоугольным объективом без трансфокатора, жестко установлена в передней части мобильного робота.
Прицельная ТВ-камера (ТК3)– черно-белого изображения без трансфокатора, жестко установлена на кисти мобильного робота.
Управление телевизионной системой осуществляется дистанционно с ПУ, а визуальная информация о работе МР отображается на мониторе ПУ.
В качестве автономного источника питания (АИП-1) для МР применяются два автомобильных аккумулятора напряжением 12 В и емкостью 72 А/ч каждый, расположенные в МР (поз. 1, рисунок 2). АИП-1 предназначены для обеспечения работы ходовых двигателей МР, исполнительных механизмов и электронных блоков бортовой части СДУ, ТВ-системы МР.
АИП-1 обеспечивают непрерывную работу МР в течение 4-х часов.
Длительность непрерывной работы зависит от циклограммы выполнения работ МРК. Наиболее энергоемкими являются передвижения МР, особенно с частым маневрированием и движением в гору.
Работа МРК
Работу МР и ПУ, рассмотрим по функциональной схеме (рисунок 3).
Управление МР осуществляет оператор с ПУ поста дистанционного управления. Возможно управление, как по кабельной линии связи, так и по радио. Режим управления – командный.
Команды управления задаются оператором на ПУ ПДУ путем нажатия на соответствующие ручки, тумблеры, кнопки и переключатели на панели управления.
Сигналы пропорционального управления поступают в канал управления пульта на аналого-цифровой преобразователь, который преобразует их в цифровой код.
Команды дискретного управления поступают на микропроцессорный модуль пультовой части канала дистанционного управления, который формирует командные посылки в цифровом виде, удобном для передачи по кабельной линии связи и по радио.
В зависимости от режима работы МРК «Радио» или «Кабель» цифровой сигнал управления поступает на радиопередатчик канала дистанционного управления (радиомодем) или в кабельный канал связи соответственно.
В зависимости от режима работы «Радио» или «Кабель» на микропроцессор бортовой части канала дистанционного управления поступают цифровые сигналы управления от радио приемника или с примника-передатчика по витой паре. Сигналы управления, прежде чем поступить на соответствующие объекты управления (двигатели транспортного средства, манипулятор, фары, коммутатор телевизионных сигналов, дополнительное оборудование), поступают на блоки управления по шине CAN, где происходит соответствующее усиление сигналов по напряжению и по току.
Необходимую информацию для выполнения работ оператор получает с помощью телевизионной системы, канала акустической связи и дополнительно устанавливаемых на борту МР датчиков (в комплект МРК не входят). Видеоизображение в виде электрического видеосигнала от пяти телекамер поступает на коммутатор телевизионных сигналов, расположенный в блоке управления телевидением бортовой части СДУ. С коммутатора сигнал от выбранной камеры поступает или на передатчик телевизионных сигналов или на передатчик по витой паре (при работе МРК по кабелю).
Движение МР осуществляется моторами-звездочками, приводящими в движение гусеницы. Для повышения проходимости и маневренности предусмотрено изменение геометрии гусеничных обводов транспортного средства. Изменяя направление вращения моторов-звездочек, можно менять направление движения МР.
Погрузочно-разгрузочные работы осуществляются манипулятором, имеющим пять ориентирующих степеней подвижности: вращение относительно вертикальной оси, подъем плеча, качание предплечья и конечного звена, ротация схвата. Каждое движение осуществляется с помощью отдельных электромеханизмов.
Мобильный робот
МР представляет собой самоходное, управляемое дистанционно, гусеничное транспортное средство с манипулятором, бортовой частью системы управления и телевизионной системой, оснащаемое дополнительным сменным оборудованием, состав которого меняется в зависимости от выполняемой задачи.
Управление МР осуществляется по кабелю или по радио.
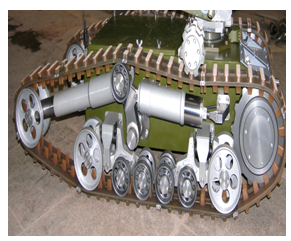

При вращении моторов-звездочек обоих бортов в одном направлении МР совершает прямолинейное движение.
При вращении моторов-звездочек левого и правого бортов в разных направлениях происходит поворот МР на месте. При повороте направо (налево) правая (левая) гусеница движется назад, левая (правая) – вперед.
При прекращении движения МР происходит динамическое торможение электродвигателей моторов-звездочек.
Манипулятор
Манипулятор состоит из опорно-поворотного устройства (поз. 1), плеча (поз. 2), предплечья (поз. 3) и кисти (поз. 4).

Кисть (рисунок 12) состоит из схвата (поз. 3) , механизма ротации (поз. 1) и механизма сжатия-раскрытия губок схвата (поз. 2). Угол вращения схвата не ограничен.
Манипулятор имеет токоподвод для подключения телекамер и исполнительных устройств, устанавливаемых на (в) схвате, а в конструкции кисти установлено вращающееся контактное устройство с восьмью контактными кольцами.
Манипулятор имеет пять ориентирующих степеней подвижности:
— поворот манипулятора вокруг вертикальной оси;
— качание плеча;
— качание предплечья;
— качание кисти;
— ротация схвата.
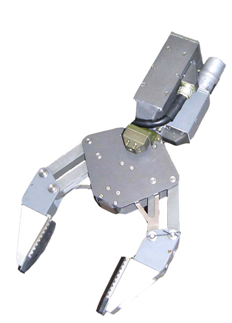
Комплект сменных губок схвата
Комплект сменных губок схвата предназначен для обеспечения надежного захвата предметов различной формы и размеров.
Комплект сменных губок схвата состоит из:
а) плоских прямых губок, установленных штатно на кисти манипулятора для захвата рабочего оборудования и плоских предметов;
б) узких удлиненных губок для захвата мелких предметов, расположенных в щелях шириной 20 мм и более, глубиной до 200 мм и отверстиях диаметром 40 мм и более;
в) губок типа грейфер с диаметром внутренней полости 160 мм;
г) губок для захвата цилиндрических предметов диаметром от 50 до 200 мм
Основой комплекта являются губки схвата прямые с колодкой, которые состоят из колодки с фиксатором и прямых губок. Все губки комплекта имеют унифицированное посадочное место. Выбранный комплект губок вставляется в посадочное место и фиксируется в выбранном положении
Дистанционное управление осуществляется с пульта по радиоканалу или по кабельной линии управления.
Дальность работы составляет, м:
— по радиоканалу до 1000;
— по кабелю до 200.
СДУ защищена от влияния непреднамеренных помех промышленного и атмосферного характера, а также помех, вызываемых работой элементов МРК.
Бортовая часть СДУ выполняет следующие задачи:
— прием управляющих команд по радиоканалу и по кабелю;
— передачу ТВ-изображений с телекамер и телеметрии по радиоканалу и по кабелю;
— управление скоростью движения и поворота МР;
— пропорциональное управление двухстепенным устройством наведения ТВ- камер обзора;
— управление пятью приводами МП;
— включение-выключение телевизионных камер;
— пропорциональное регулирование усилия сжатия схвата;
— включение-выключение осветителей;
— включение-выключение светового маяка и звукового сигнала;
— отработку команд по управлению объективом-трансфокатором;
— отработку команд по переходу управления с «Радио» на «Кабель»;
— отработку команд по приведению в действие дополнительного оборудования;
— передачу по каналу телеметрии информации о состоянии боевой цепи срабатывания спецсредств, величине зарядки бортовых аккумуляторов, углах крена и дифферента, данных с приборов разведки;
— выдачу команд приведения в действие систем пожаротушения и охлаждения МР.
В случаях, когда управление по радиоканалу затруднено или невозможно в результате действия внешних электромагнитных возмущающих факторов, используется кабельное управление МР при помощи катушки кабельной линии управления (далее – КЛУ). КЛУ обеспечивает передачу команд управления с ПУ на борт МР, передачу команд приведения в действие спецсредств и приём ТВ-сигналов с борта МР на ПУ.
КЛУ обеспечивает размещение и свободное наматывание и сматывание кабеля управления длиной до 200 метров.
Пульт управления.
Пульт управления предназначен для формирования команд дистанционного управления мобильным роботом, получения телевизионного сигнала от телекамер и отображения телеметрической информации, поступающей с мобильного робота.
Формирование команд осуществляется с помощью органов управления панели пульта.
Управление работой робототехнического комплекса осуществляется по кабелю или по эфиру.
Пульт управления осуществляет управление навесным оборудованием и обрабатывет и отображает сигналы телеметрии от мобильного робота.
Сигналы телеметрии робототехнического комплекса отображаются на дисплее панели управления и имеют как графическое, так и цифровое отображение.
На дисплей панели управления выводится схема робототехнического комплекса с телеметрическими данными о состояния различных устройств и механизмов робототехнического комплекса и состояние активных органов управления.
Панель управления формирует команды управления:
— определяет режим работы пульта управления – радио или кабель;
— выбирает активное звено (манипулятор) робототехнического комплекса;
— выбирает активную телекамеру робототехнического комплекса;
— осуществляет пропорциональное управление скоростью звеньев робототехнического комплекса и движением;
— формирует дискретные команды управления для навесного оборудования робототехнического комплекса;
— формирует команды управления транспортным средством.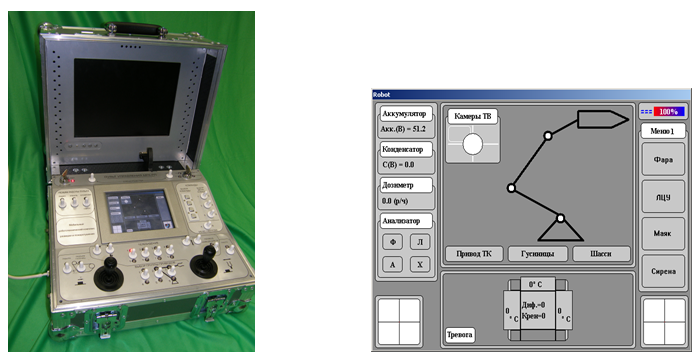
Формирование команд управления МР производится органами управления с использованием тумблеров, кнопок и джойстиков.
Панель пульта разбита на функциональные зоны управления:
— режим работы пульта;
— телевидение;
— выбор группы приводов;
— выбор команд;
— выбор меню команд.
Каждая зона управления формирует соответствующие команды управления.
Применение АБР-РОБОТ и МРК-РП при ликвидации возможных
пожаров (загораний) и аварийных ситуаций на охраняемых объектах
ОАО «Уральский электрохимический комбинат»
- Проведение разведки места пожара (аварии) при помощи телевизионных систем, приборов радиационной и химической разведки МРК-РП.
- Осаждение газообразного облака гексафторида урана (ГФУ) в случае выброса на конденсационно-испарительных участках (КИУ) подразделений основного производства при помощи установки пожаротушения тонкораспылённой водой УПТВ-300 и МРК-РП.
- Тушение загораний на ядерноопасных участках подразделений основного производства и закрытых распределительных устройствах энергообъектов при помощи МРК-РП с модулем порошкового пожаротушения.
- Тушение загораний на ядерноопасных участках подразделений основного производства и закрытых распределительных устройствах энергообъектов при помощи МРК-РП с присоединённой рабочей рукавной линией диаметром 38 мм (51 мм) с ручным универсальным стволом для подачи «сухой» компрессионной пены, подаваемой от автомобиля пожарного специального тушения NATISK.
- Проведение развёртывания сил и средств в условиях возможного взрыва технологических аппаратов (установок), например: транспортировка и установка на позиции переносного лафетного универсального пожарного ствола АКРОН «Mercury-Master 1000тм» массой 10,5 кг, прокладка магистральной рукавной линии и её присоединение к лафетному стволу.
Указание мер безопасности
К работе с МРК допускаются только обслуживающий персонал, прошедший подготовку в специальном учебном центре и имеющий удостоверение на право управления и работы с МРК и прошедший инструктаж по технике безопасности.
В целях надежной работы изделия и безопасности обслуживающего персонала необходимо соблюдать общие правила техники безопасности, установленные на месте эксплуатации изделия. Применять изделие допускается только в соответствии с назначением, указанным в РЭ.
При работе с использованием дополнительного оборудования не входящего в состав МРК необходимо соблюдать требования безопасности, изложенные в руководствах по их эксплуатации на это оборудование.
Необходимо соблюдать осторожность при работе с зарядным устройством, входящим с состав изделия, так как используется входное напряжение 220 В с частотой 50 Гц. Во избежание несчастных случаев требуется соблюдение общих мер безопасности от поражения обслуживающего персонала электрическим током.
Запрещается применять в зарядном устройстве предохранители изготовленные из проводников диаметром больше допустимого для каждого типа ЗУ. Перед заменой предохранителя в ЗУ не забудьте вынуть вилку из розетки электросети.
Во время зарядки АИП запрещается вскрывать изделие, производить ремонтные и профилактические работы, а также проверять работоспособность изделия.
При проверке функционирования МРК запрещается находиться ближедвух метров к МР, проверять качество стыковки соединителей при включенных приводах.
Изделие не представляет опасности для жизни и здоровья человека и окружающей среды при соблюдении правил эксплуатации, хранения и транспортирования, изложенных в РЭ.
Внимание! При зарядке аккумуляторов возможно образование взрывоопасной смеси. Зарядку проводить в хорошо проветриваемом помещении. Зарядку аккумуляторов МР проводить только при снятой крышке аккумуляторного отсека.
3.4.2.4. Работа с установкой пожаротушения тонкораспыленной водой
Для проведения работ с использованием установки пожаротушения тонкораспыленной водой УПТВ-50, катушка с рукавом высокого давления навешивается на МР (поз. 1, (рисунок 29), распылитель поз. 1 (рисунок 30) устанавливается на звене манипулятора и они подключаются к клапанной коробке поз. 3 (рисунок 29). Клапанная коробка подключается к разъему поз. 4.

Рисунок 29
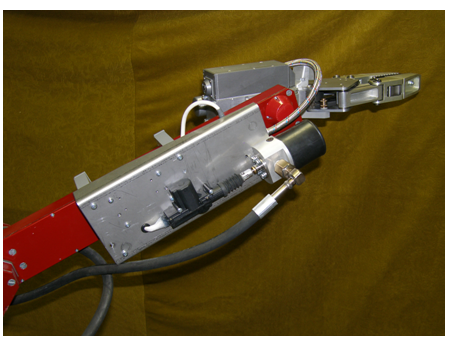
Рисунок 30
Укладка шланга по манипулятору показана на рисунке 31.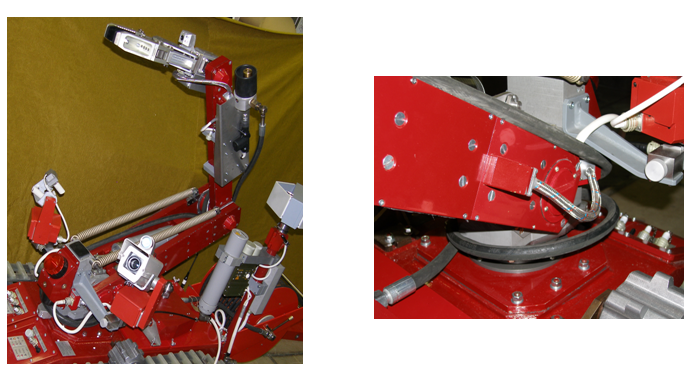
Рисунок 31
Порядок работы с УПТВ-50 в ее руководстве по эксплуатации.
Для включения подачи воды на ПУ тумблером «ВЫБОР МЕНЮ КОМАНД» выбрать «3», в графическом окне монитора панели управления ПУ отобразятся команды «Меню 3».
Нажать кнопку напротив команды «Подача воды». Визуально наблюдать исполнение команды на МР. Управляю манипулятором направить струю на объект. Для изменения распыла струи нажать кнопку напротив команды «Компактная струя». Для отмены команд повторно нажать соответствующие кнопки.
Для охлаждения МР на клапанной коробке установлен распылитель (поз. 2 рисунок 29). Для включения режима охлаждения МР необходимо тумблером «ВЫБОР МЕНЮ КОМАНД» выбрать «2» и нажать кнопку напротив команды «Орошение». Визуально наблюдать исполнение команды на МР.
3.4.2.5. Работа с модулем водопенного пожаротушения
Порядок заправки водопенного модуля согласно инструкции по его эксплуатации. Модуль навешивается на МР (рисунок 32). Подключение модуля и работа с ним в составе МР согласно п. 3.4.2.4.
Рисунок 32
3.4.2.6. Работа с модулем порошкового пожаротушения
Порядок заправки порошкового модуля и соблюдения правил техники безопасности согласно инструкции по его эксплуатации. Модуль навешивается на МР (рисунок 33). Пиропатрон подключается кабелем к разъему «Оружие» (рисунок 27).

Рисунок 33
Внимание ! Подключение проводить строго в следующей последовательности:
— свободные концы кабеля скруткой подключить к пиропатрону;
— при выключенном МР и выключенном тумблере (в нижнем положении) (поз. 10, рисунок 27) подключить кабель к разъему «Оружие»;
— включить МР;
— перевести тумблер в верхнее положение «I».
Для активации порошкового модуля необходимо на ПУ повернуть ключ «СПЕЦСРЕДСТВА» в положение «С2». Начнется зарядка боевых конденсаторов. Процесс зарядки контролировать по показаниям окна «Конденсаторы» (поз. 2, рисунок 20). При достижении значения зарядки 19…20В боевая цепь готова к работе. Нажатием двух тумблеров «ПУСК» (поз. 2 и 4, рисунок 21) инициировать порошковый модуль. Перед активацией МР повернуть в сторону объекта.
Вместо распылителя (поз. 1, рисунок 33) может устанавливаться успокоитель в схвате манипулятора и с помощью шланга подключаться к порошковому модулю. В зависимости от применяемого типа распылителя («елочка» или успокоитель) применяются различные марки порошков.
3.4.2.7. Работа с пеногенератором
Пеногенератор ГПВК устанавливается в схвате манипулятора (поз.1, рисунок 34).
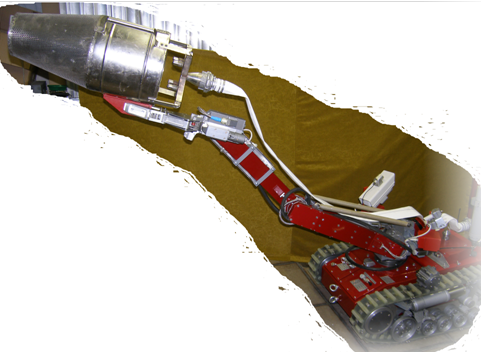
Рисунок 34
С помощью шланга подключается к фланцу переходнику, закрепленном на МР (рисунок 35).
Рисунок 35
Подача раствора пенообразователя на пеногенератор осуществляется от внешнего источника по рукавной линии. В качестве внешнего источника может использоваться пожарный автомобиль, оснащенный пенно-баком и системой дозирования пенообразователя. Рабочее давление на пеногенераторе должно быть в диапазоне 4÷8 атм. при расходе 1л/с. Применяемый пенообразователь по своим характеристикам обеспечивает получение высокократной пены (более 200).
Направление подачи струи пены производится с помощью команд подаваемых на исполнительные механизмы манипулятора.
Раздел 2
«Наставление по технической службе федеральной противопожарной службы
в части робототехнических средств пожаротушения»
I. ОБЩИЕ ПОЛОЖЕНИЯ
1. Настоящее Наставление определяет порядок эксплуатации и ремонта робототехнических средств, вспомогательной техники и робототехнического имущества (далее — робототехнических средств и имущества) в системе Федеральной противопожарной службы МЧС России.
2. Робототехнические средства (далее — РТС) и имущество— материально-технические средства, состоящие на вооружении или снабжении сил МЧС России и предназначенные для проведения аварийно-спасательных, противопожарных, неотложно-восстановительных и других специальных работ, связанных с риском для жизни личного состава. Указанные работы могут, в том числе, проводиться в условиях радиационного и химического загрязнений, а также биологического заражения. РТС и имуществом являются образцы робототехники и вспомогательных техники и оборудования для ее эксплуатации.
3. Под робототехническими средствами понимаются образцы робототехники, использование которых требует закрепления за ними подготовленного личного состава (экипажей, расчетов) и для которых установлены плановые виды ремонта, а также нормы расхода ресурсов, исчисляемые в моточасах (часах) работы или в километрах пробега.
По среде применения РТС подразделяются на:
наземные РТС, в том числе пожаротушения;
воздушные РТС;
подводные РТС.
Под вспомогательной техникой РТС понимается техника, обеспечивающая в процессе эксплуатации РТС сервисные, в том числе транспортные и погрузочные операции.
К вспомогательной технике относятся:
транспортные средства для РТС (автомобили, прицепы, трейлеры, плавсредства и т.д.);
— погрузо-разгрузочные средства и приспособления для РТС (подъемные краны, гидроподъемники, лебедки и т.д.), поступающие по табелям и нормам снабжения.
Под робототехническим имуществом понимается также вспомогательное оборудование, обеспечивающее эксплуатацию РТС, поставляемое по нормам табелизации и снабжения, не требующее закрепления личного состава, которым не установлены или не определены годовые нормы расхода ресурсов, а также агрегаты, узлы, запасные части к робототехнике и расходные материалы.
К робототехническому имуществу относятся:
навесное оборудование и сменный инструмент;
агрегаты, узлы и запасные части к робототехнике, другие табельные, расходные и вспомогательные средства, поступающие по табелям и нормам снабжения;
нормативно-техническая документация;
учебно-тренировочные средства (разрезная техника, агрегаты, тренажеры, макеты, стенды, кинофильмы, специальная литература, плакаты и др.), используемые для занятий по специальной подготовке в специальных робототехнических подразделениях МЧС России (далее — подразделение).
4. Эксплуатация робототехники и имущества — это стадия жизненного цикла изделия с момента принятия его подразделением от завода-изготовителя или ремонтного предприятия, включающая комплекс мероприятий по вводу в эксплуатацию, приведению в установленную степень готовности по назначению, поддержанию установленной степени готовности к использованию, использованию по назначению, хранению и транспортированию.
5. РТС и имущество эксплуатируются подразделениями, в которых они положены по штатам (табелям), только по ее прямому назначению в соответствии с инструкциями по эксплуатации и в пределах норм расхода ресурсов, установленных настоящим Руководством.
6. Робототехника текущего обеспечения в подразделениях распределяется по группам эксплуатации. Для робототехники установлены следующие группы эксплуатации: боевая и учебно-боевая.
Зачисление техники в группы эксплуатации производится приказами начальников подразделений на основании штатов и табелей к ним в соответствии с требованиями пунктов 7 и 8 настоящего Руководства.
7. Робототехника, предназначенная для действий в условиях проведения работ по ликвидации последствий чрезвычайных ситуаций (далее — ЧС), а также для проведения разведки в очаге ЧС, а также целям обучения, зачисляется в боевую и учебно-боевую группы эксплуатации.
Робототехника, предназначенная табелями к штатам для обеспечения учебного процесса в учебных подразделениях, готовящих специалистов, обслуживающих РТС, а также на кафедрах высших учебных заведений МЧС России зачисляется в учебно-боевую группу эксплуатации.
8. В боевую группу эксплуатации зачисляется робототехника, имеющая неснижаемый запас ресурса до очередного планового ремонта не менее:
а) 5000 км — для робототехники, смонтированной на специальных колесных шасси;
б) 3500 км или 1000 моточасов— для робототехники, смонтированной на гусеничных базовых шасси, и машин индивидуальной компоновки, собранных на типовых узлах и агрегатах автомобильных базовых шасси и гусеничных базовых машин;
в) 1000 моточасов (часов) — для автомобильных и пневмоколесных шасси РТС, кранов, крановых самопогрузчиков, автопогрузчиков и электротехнических средств, мотопомп и мотоэлектростанций;
г) 450 моточасов — для буксирно-моторных плавсредств, обслуживающих подводные РТС.
9 . Робототехника и имущество по техническому и качественному состоянию учитываются по категориям:
робототехника — по пяти категориям:
первая — новая, поступившая с заводов промышленности робототехника с пробегом (наработкой) в пределах гарантийных обязательств, устанавливаемых заводами-изготовителями;
вторая — исправная робототехника с пробегом (наработкой, сроком хранения) свыше гарантийных обязательств, устанавливаемых заводами-изготовителями;
третья — робототехника, требующая среднего ремонта. Для навесных, прицепных, переносных механизмов и электротехнических средств третья категория не устанавливается;
четвертая — вся робототехника, требующая капитального ремонта;
пятая — робототехника, выработавшая ресурс (срок службы) до списания (выслужившая предельные сроки хранения), поврежденная, подлежащая списанию, восстановление которой невозможно или нецелесообразно.
Техническое состояние робототехники, смонтированной на автомобильном базовом шасси или гусеничной базовой машине, определяется техническим состоянием шасси (машины), а также состоянием специального (рабочего) оборудования, установленного (смонтированного) на данном шасси (машине). Категория робототехники в целом устанавливается по низшей из категорий, определяемых в отдельности для шасси (машины) и специального (рабочего) оборудования;
робототехническое имущество — по трем категориям:
первая — новое, не бывшее в использовании имущество, со сроком хранения до 50 процентов от предельного;
вторая — годное имущество, находящееся или бывшее в использовании, а также новое, со сроками хранения свыше 50 процентов от предельного;
пятая — негодное, подлежащее списанию имущество, а также находящее на хранении свыше предельных сроков хранения.
Третья и четвертая категории для робототехнического имущества не устанавливаются.
10. Для перевода робототехники и имущества из одной категории в другую составляются акт технического состояния и акт изменения качественного состояния согласно Наставлением по технической службе… ФПС МЧС России (п.79 приказа МЧС России от 25.12.2002 № 608), которые утверждаются начальником подразделения. Из первой категории во вторую техника переводится после отработки установленного срока службы (пробега, наработки, хранения), о чем указывается в формулярах (паспортах) изделий; акты в этом случае не составляются.
11. Все РТС и имущество независимо от их назначения, источников поступления и способов приобретения или изготовления подлежат обязательному учету в соответствии с Наставлением…(п.10 настоящего документа). Ответственность за организацию и ведение учета несут начальники подразделений, складов и мастерских. До постановки на учет и ввода в строй использование робототехнической техники и имущества запрещается.
12. Эксплуатация (в том числе ввод в строй, реконструкция, ремонт, модернизация) грузоподъемных кранов всех типов, кранов-манипуляторов, грузозахватных органов и приспособлений, подъемников и других технических устройств, подконтрольных Инспекции государственного технического надзора (далее именуются — объекты гостехнадзора), входящих в состав РТС и имущества, должна осуществляться в соответствии с требованиями Руководства по обеспечению выполнения нормативно-технических документов Федерального горного и промышленного надзора России при разработке, производстве, эксплуатации, модернизации и реконструкции объектов, подконтрольных органам государственного технического надзора (далее именуется — Руководство РТБ-95).
По отношению к объектам гостехнадзора, входящим в состав РТС и имущества, необходимо руководствоваться определениями терминов «эксплуатация», «ремонт», «капитальный ремонт», «срок службы», «расчетный срок службы», «экспертное обследование», «техническое диагностирование (диагностирование)», «авария», «инцидент» и другими определениями терминов, приведенными в нормативных документах Федерального горного и промышленного надзора России и Руководстве РТБ – 95.
13. Поступившее в подразделение табельное робототехническое имущество закрепляется за личным составом и маркируется. Использование имущества, не закрепленного за личным составом, запрещается.
Маркировка табельного робототехнического имущества может быть выполнена на специальной табличке или непосредственно на корпусе или футляре (чехле) изделия. В маркировке указываются: наименование или марка изделия, номер по книге учета, подразделение, лицо, ответственное за эксплуатацию.
14. Робототехническая техника, положенная по штатам (табелям) в подразделениях, эксплуатируется в пределах временных норм, определяющих сроки службы (ВНСС) РТС МЧС России различного назначения, в том числе РТС пожаротушения, указанных в приложении № 2 к настоящему Наставлению.
Примечание: годовые нормы расхода ресурсов РТС различного назначения будут выработаны по результатам их эксплуатации в системе МЧС России по выработке сроков службы серийных образцов. Соответствующие работы должны быть предусмотрены планами НИОКР МЧС России.
Использование техники, находящейся в подразделении сверх штатов (табелей), запрещается. Эта техника приводится в исправное состояние и ставится на хранение до получения указаний о дальнейшем ее применении.
15. В целях сокращения количества робототехники, находящейся в использовании, и обеспечения равномерного выхода ее в ремонт приказом начальника подразделения разрешается увеличивать до двух годовых норм расход ресурсов одних машин за счет снижения годовых норм расхода ресурсов других однотипных машин такой же группы эксплуатации.
16. Новая, а также прошедшая средний или капитальный ремонт робототехника, поступившая в подразделение, подвергается обкатке.
Обкатка робототехники проводится согласно указаниям предприятий-изготовителей и Инструкциям по обкатке соответствующих машин.
Обкатка автомобильных базовых шасси робототехники осуществляется согласно Инструкции по обкатке автомобилей, гусеничных тягачей, транспортеров и тракторов. Для этого сверх годовых норм выделяются ресурсы в соответствии с Годовыми нормами расхода ресурсов автомобильной техники в МЧС России.
Обкатка робототехники, поступившей в подразделение на укомплектование, проводится только после постановки ее на учет согласно пункту 11 настоящего Наставления и присвоения ей регистрационных номеров или государственных регистрационных знаков. Технике, предназначенной для постановки на длительное хранение, государственные регистрационные знаки присваиваются только на период обкатки.
17. Не подвергается обкатке робототехника, прошедшая обкатку на предприятии-изготовителе (ремонтном предприятии) в полном объеме, установленном техническими условиями, о чем в формулярах (паспортах) в разделе «Обкатка машин» должны быть сделаны соответствующие записи, заверенные печатью предприятия-изготовителя (ремонтного предприятия).
Не подвергаются обкатке гусеничные базовые шасси РТС и имущества.
18. Ресурсы, израсходованные на контрольные и приемосдаточные испытания на заводах, зачисляются в норму расхода ресурсов на обкатку робототехники в подразделениях и заносятся в формуляр (паспорт) техники.
боевую и учебно-боевую группы эксплуатации, а также для всей робототехники, поступающей в подразделение на длительное хранение, расходуются сверх установленных годовых норм. Ресурсы на обкатку робототехники, предназначенной для зачисления в
Обкатка робототехники других групп проводится за счет годовых норм расхода ресурсов, установленных для этих групп эксплуатации.
19. В период обкатки робототехники допускается расходовать ресурсы робототехники боевой и учебно-боевой групп эксплуатации – для выполнения задач боевой и учебной подготовки.. Отметка о проведенной обкатке делается в формуляре (паспорте) техники.
20. Планы эксплуатации и ремонта робототехники подразделения составляются по службам. Если в подразделении предусмотрена одна служба, то в этом случае составляется единый план для всей техники по разделам: робототехническая, автомобильная и т.д. Разработка, подписание и утверждение годовых и месячных планов эксплуатации и ремонта осуществляется в соответствии с требованиями Наставления о технической службе….
21. При поступлении робототехники на укомплектование штатной (табельной) потребности подразделений или по прибытии ее из ремонта расход ресурсов на каждый оставшийся месяц до конца текущего года планируется в пределах 1/12 годовой нормы той группы эксплуатации, в которую она зачислена.
22. Порядок подготовки образца робототехники для транспортирования различными видами транспорта, способы крепления образца при транспортировании, требования к транспортированию, порядок погрузки, выгрузки и меры предосторожности выполняются в соответствии с Руководством по эксплуатации на конкретный образец робототехники.
II. ИСПОЛЬЗОВАНИЕ РТС И ИМУЩЕСТВА
23. Использование робототехники и робототехнического имущества заключается в применении их по назначению с соблюдением режимов и условий, обеспечивающих нормальное функционирование с параметрами, установленными нормативно-технической документацией.
24. Ответственность за техническое состояние и готовность к использованию РТС и имущества по назначению, организацию контроля за расходом ресурсов, техническое обслуживание и ремонт техники возлагается на начальника подразделения, начальника технической службы.
25. При планировании эксплуатации робототехники определяется расход ресурсов в моточасах (часах), километрах, при этом разрабатывается следующая документация:
— перспективный план эксплуатации и ремонта техники воинской части;
— годовой план контроля технического состояния РТС и имущества с проведением технического диагностирования специалистами ремонтного подразделения и комплексной технической комиссией подразделения;
— месячный план эксплуатации и ремонта техники подразделения;
— месячный план контрольно-технического осмотра и технического диагностирования РТС и имущества;
— производственный план и план-задание ремонтному подразделению на месяц.
В целях комплексного проведения контроля технического состояния, технического обслуживания и ремонта робототехники по техническому состоянию разрабатываются следующие планирующие документы:
а) в подразделении:
— годовой план контроля технического состояния техники с проведением технического диагностирования специалистами ремонтного подразделения и комплексной технической комиссией;
— месячный план контрольно-технического осмотра и технического диагностирования техники;
— план-задание ремонтному подразделению на месяц.
б) в отделении:
— годовой план технического диагностирования техники, отработавшей межремонтный ресурс;
— производственное задание ремонтному подразделению на год;
— план-задание ремонтному подразделению на месяц.
в) в ремонтном подразделении:
— план организационно-технических мероприятий на год;
— производственный план на год;
— план-график технического обслуживания и ремонта техники на месяц;
г) в ремонтном подразделении:
— план-график технического обслуживания и ремонта вооружения и военной техники на месяц.
— Формы планирующих документов приведены в приложениях к Наставлению по технической службе….
26. Для выполнения мероприятий по проведению итоговых проверок и инспектирования подразделений в последних создается резерв ресурсов в размере 5% от годовых норм расхода ресурсов техники, обеспеченный топливом и смазочными материалами.
27. Контроль за расходом ресурсов и правильностью использования робототехники и имущества осуществляется:
— начальником подразделения – не реже одного раза в квартал;
— начальником технической службы – не реже одного раза в месяц;
— при работе комиссии с участием начальника финансовой части (главного бухгалтера) по проверке правильности оформления, обработки и хранения эксплуатационных карт и их корешков за предыдущий квартал – не реже одного раза в квартал.
Результаты контроля за расходом ресурсов и правильностью использования техники оформляются приказом по подразделению в конце каждого года.
28. За использование робототехники не по назначению и перерасход ресурсов сверх норм, установленных настоящим Наставлением, виновные лица привлекаются к ответственности в соответствии с действующим законодательством.
29. Учет наработки робототехники ведется по показаниям спидометров и счетчиков моточасов в том числе:
— на образцах робототехники, где имеются предусмотренные заводами-изготовителями спидометры и счетчики моточасов работы двигателя базового шасси, учет наработки ведется в километрах пробега для базовых шасси, а также в моточасах работы двигателя и специального оборудования;
— учет наработки специального оборудования робототехники, привод которого осуществляется от собственного двигателя, ведется по его фактической наработке;
— учет наработки специального оборудования робототехники, привод которого осуществляется от двигателей базовых шасси, не имеющих счетчиков моточасов, ведется по фактическому времени работы специального оборудования.
Один моточас работы специального оборудования приравнивается к пробегу:
— для робототехники, смонтированной на автомобильных шасси — 25 км;
— для техники, смонтированной на специальных колесных шасси, на бронетанковых базовых шасси, колесных тягачах, гусеничных транспортерах и тягачах — 15 км.
30. Робототехнику, досрочно выработавшую запланированный на год ресурс, использовать запрещается.
31. Робототехника устаревших марок, ремонт которой прекращен на ремонтных предприятиях, эксплуатируется до очередного планового ремонта и подлежит списанию.
32. Объекты гостехнадзора должны подвергаться в процессе эксплуатации техническому освидетельствованию в порядке, определенном нормативно-технической документацией соответствующих объектов гостехнадзора и Руководством РТБ-95.
В целях установления возможности и условий дальнейшей эксплуатации объектов гостехнадзора, отработавших срок службы, указанный в паспорте объекта, должно проводиться экспертное обследование (диагностирование) таких объектов специализированными организациями, имеющими лицензию Федерального горного и промышленного надзора России. Если в паспорте объекта гостехнадзора срок службы не указан, следует руководствоваться нормативными документами Федерального горного и промышленного надзора России, устанавливающими этот срок.
Текст ГОСТ Р 60.2.3.2-2022 Роботы и робототехнические устройства. Сервисные роботы по персональному уходу. Руководство по применению ГОСТ Р 60.2.2.1-2016
ГОСТ Р 60.2.3.2-2022
(ISO/TR 23482-2:2019)
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Роботы и робототехнические устройства
СЕРВИСНЫЕ РОБОТЫ ПО ПЕРСОНАЛЬНОМУ УХОДУ
Руководство по применению ГОСТ Р 60.2.2.1-2016
Robots and robotic devices. Service robots for personal care. Application guidelines for GOST R 60.2.2.1-2016
ОКС 25.040.30
Дата введения 2022-10-01
Предисловие
1 ПОДГОТОВЛЕН Федеральным государственным автономным научным учреждением «Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики» (ЦНИИ РТК) совместно с Обществом с ограниченной ответственностью «Открытая Робототехника» (ООО «Открытая Робототехника») на основе собственного перевода на русский язык англоязычной версии документа, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 141 «Робототехника»
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 25 апреля 2022 г. N 222-ст
4 Настоящий стандарт является модифицированным по отношению к международному документу ISO/TR 23482-2:2019* «Робототехника. Применение ИСО 13482. Часть 2. Руководство по применению» (ISO/TR 23482-2:2019 «Robotics — Application of ISO 13482 — Part 2: Application guidelines», MOD) путем внесения технических отклонений, объяснение которых приведено во введении к настоящему стандарту.
Наименование настоящего стандарта изменено относительно наименования указанного международного документа для приведения в соответствие с ГОСТ Р 1.5-2012 (пункт 3.5) и для увязки с наименованиями, принятыми в существующем комплексе национальных стандартов Российской Федерации
Сведения о соответствии ссылочных национальных стандартов международным стандартам, использованным в качестве ссылочных в примененном международном документе, приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
Правила применения настоящего стандарта установлены в статье 26 Федерального закона от 29 июня 2015 г. N 162-ФЗ «О стандартизации в Российской Федерации». Информация об изменениях к настоящему стандарту публикуется в ежегодном (по состоянию на 1 января текущего года) информационном указателе «Национальные стандарты», а официальный текст изменений и поправок — в ежемесячном информационном указателе «Национальные стандарты». В случае пересмотра (замены) или отмены настоящего стандарта соответствующее уведомление будет опубликовано в ближайшем выпуске ежемесячного информационного указателя «Национальные стандарты». Соответствующая информация, уведомление и тексты размещаются также в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет (www.rst.gov.ru)
Введение
Требования стандартов комплекса ГОСТ Р 60 распространяются на роботов и робототехнические устройства. Их целью является повышение интероперабельности роботов и их компонентов, а также снижение затрат на их разработку, производство и обслуживание за счет стандартизации и унификации процессов, интерфейсов, узлов и параметров.
Стандарты комплекса ГОСТ Р 60 представляют собой совокупность отдельно издаваемых стандартов. Стандарты данного комплекса относятся к одной из следующих тематических групп: «Общие положения, основные понятия, термины и определения», «Технические и эксплуатационные характеристики», «Безопасность», «Виды и методы испытаний», «Механические интерфейсы», «Электрические интерфейсы», «Коммуникационные интерфейсы», «Методы моделирования и программирования», «Методы построения траектории движения (навигация)», «Конструктивные элементы». Стандарты любой тематической группы могут относиться как ко всем роботам и робототехническим устройствам, так и к отдельным группам объектов стандартизации — промышленным роботам в целом, промышленным манипуляционным роботам, промышленным транспортным роботам, сервисным роботам в целом, сервисным манипуляционным роботам, сервисным мобильным роботам, а также к морским робототехническим комплексам.
Настоящий стандарт относится к тематической группе «Виды и методы испытаний» и распространяется на сервисных роботов по персональному уходу.
Настоящий стандарт является модифицированным по отношению к международному документу ISO/TR 23482-2:2019, разработанному техническим комитетом ИСО/ТК 299 «Робототехника».
В настоящий стандарт внесены следующие технические отклонения по отношению к ISO/TR 23482-2:2019:
— настоящий стандарт оформлен с соблюдением правил, установленных в ГОСТ Р 1.5, в соответствии с ГОСТ Р 1.7-2014, 7.2;
— нормативные ссылки на международные стандарты заменены на соответствующие идентичные национальные и межгосударственные стандарты;
— в разделе 3 определения терминов приведены в соответствии с идентичными национальными стандартами;
— из подраздела 6.2 исключен пример, в котором приведены сведения из технического отчета, выпущенного в США;
— в библиографию не включены ссылки на международные стандарты, которым соответствуют идентичные национальные и межгосударственные стандарты, приведенные в разделе 2 настоящего стандарта.
1 Область применения
Настоящий стандарт устанавливает руководство по применения ГОСТ Р 60.2.2.1 и предназначен для изготовителей роботов с целью облегчить проектирование сервисных роботов по персональному уходу в соответствии с требованиями ГОСТ Р 60.2.2.1. Данное руководство предназначено в первую очередь для пользователей, имеющих недостаточный опыт в оценке риска и снижении риска, и содержит пояснения и руководство по использованию новых терминов и требований безопасности, установленных для обеспечения тесного взаимодействия между человеком и роботом, а также контактов между ними, включая мобильных обслуживающих роботов, роботов для оказания физической помощи и роботов для перевозки людей. Настоящий стандарт определяет применение ГОСТ Р 60.2.2.1 ко всем типам сервисных роботов и содержит соответствующие примеры.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ ISO 12100-2013 Безопасность машин. Основные принципы конструирования. Оценки риска и снижения риска
ГОСТ ISO 13849-1 Безопасность оборудования. Элементы систем управления, связанные с безопасностью. Часть 1. Общие принципы конструирования
ГОСТ ISO/IEC 17025 Общие требования к компетентности испытательных и калибровочных лабораторий
ГОСТ IEC 60204-1 Безопасность машин. Электрооборудование машин и механизмов. Часть 1. Общие требования
ГОСТ IEC 60335-2-29 Бытовые и аналогичные электрические приборы. Безопасность. Часть 2-29. Дополнительные требования к зарядным устройствам батарей
ГОСТ Р 60.0.2.1 Роботы и робототехнические устройства. Общие требования по безопасности
ГОСТ Р 60.1.2.1 Роботы и робототехнические устройства. Требования по безопасности для промышленных роботов. Часть 1. Роботы
ГОСТ Р 60.1.2.2 Роботы и робототехнические устройства. Требования по безопасности для промышленных роботов. Часть 2. Робототехнические системы и их интеграция
ГОСТ Р 60.2.2.1-2016/ИСО 13482:2014 Роботы и робототехнические устройства. Требования безопасности для роботов по персональному уходу
ГОСТ Р МЭК 60601-1 Изделия медицинские электрические. Часть 1. Общие требования безопасности с учетом основных функциональных характеристик
ГОСТ Р МЭК 62061 Безопасность оборудования. Функциональная безопасность систем управления электрических, электронных и программируемых электронных, связанных с безопасностью
ГОСТ Р МЭК 62133-1 Аккумуляторы и аккумуляторные батареи, содержащие щелочной или другие некислотные электролиты. Требования безопасности портативных герметичных аккумуляторов и батарей из них при портативном применении. Часть 1. Системы на основе никеля
Примечание — При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодному информационному указателю «Национальные стандарты», который опубликован по состоянию на 1 января текущего года, и по выпускам ежемесячного информационного указателя «Национальные стандарты» за текущий год. Если заменен ссылочный стандарт, на который дана недатированная ссылка, то рекомендуется использовать действующую версию этого стандарта с учетом всех внесенных в данную версию изменений. Если заменен ссылочный стандарт, на который дана датированная ссылка, то рекомендуется использовать версию этого стандарта с указанным выше годом утверждения (принятия). Если после утверждения настоящего стандарта в ссылочный стандарт, на который дана датированная ссылка, внесено изменение, затрагивающее положение, на которое дана ссылка, то это положение рекомендуется применять без учета данного изменения. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, рекомендуется применять в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены следующие термины с соответствующими определениями.
3.1
|
сервисный робот (service robot): Робот, который выполняет задания, полезные для человека или оборудования, за исключением применений в целях промышленной автоматизации. [ГОСТ Р 60.0.0.4-2019, статья 2.10] |
3.2
|
робот по персональному уходу (personal care robot): Сервисный робот, который выполняет действия, направленные непосредственно на улучшение качества жизни людей, исключая медицинские применения. [ГОСТ Р 60.2.2.1-2016, статья 3.13] |
3.3
|
промышленный робот (industrial robot): Автоматически управляемый, перепрограммируемый, реконфигурируемый манипулятор, программируемый по трем или более степеням подвижности, который может быть либо установлен стационарно, либо перемещаться для применения в целях промышленной автоматизации. [ГОСТ Р 60.0.0.4-2019, статья 2.9] |
3.4
|
мобильный обслуживающий робот (mobile servant robot): Робот по персональному уходу (3.2), который способен перемещаться для выполнения заданий по обслуживанию (например, перемещение объектов или обмен информацией) при взаимодействии с людьми. [ГОСТ Р 60.2.2.1-2016, статья 3.14] |
3.5
|
робот для оказания физической помощи (physical assistant robot): Робот по персональному уходу (3.2), который физически помогает пользователю выполнять необходимые задания, обеспечивая дополнение или увеличение его персональных возможностей. [ГОСТ Р 60.2.2.1-2016, статья 3.15] |
3.6
|
робот для перевозки человека (person carrier robot): Робот по персональному уходу (3.2), назначением которого является доставка людей в заданное место. [ГОСТ Р 60.2.2.1-2016, статья 3.16] |
3.7 медицинский робот (medical robot): Робот, предназначенный для использования в качестве медицинского электрического оборудования или медицинской электрической системы.
Примечание — Термины «медицинское электрическое оборудование» и «медицинская электрическая система» определены в ГОСТ Р МЭК 60601-1.
3.8 робот для домашних работ (household robot): Исполнительный механизм с определенной степенью автономности, функционирующий в домашней или подобной ей внешней среде с целью выполнения задач по назначению.
Примечание — Функционирование включает перемещение и/или движение корпуса робота.
4 Указания по области применения ГОСТ Р 60.2.2.1, нестыковкам и перекрытиям с другими стандартами
4.1 Общие положения
В данном разделе представлены типы роботов и их применения, относящиеся к области применения ГОСТ Р 60.2.2.1. Кроме того, в данном разделе приведены сведения о нестыковках и перекрытиях со стандартами, относящимися к похожим изделиям, таким как промышленные роботы, медицинские роботы и легкие электрические транспортные средства.
4.2 Указание по определению сервисных роботов
К сервисным роботам относят разные категории роботов, выполняющих полезную работу для людей или оборудования. На рисунке 1 приведены категории роботов, соответствующих определению сервисного робота, и показано, как они соотносятся с другими областями применения.
|
|
Рисунок 1 — Категории роботов по персональному уходу и их связь с другими областями применения
Термин «сервисный робот» относится к большинству разновидностей роботов, за исключением промышленных роботов, как показано на рисунке 1. Разные юридические и законодательные требования применимы к разным категориям роботов, и одной из первоочередных задач изготовителя при коммерциализации робота является установление категории роботов, к которой относится разрабатываемый робот. Категории роботов, представляющие интерес для изготовителей роботов на дату публикации ГОСТ Р 60.2.2.1, приведены в таблице 1.
Таблица 1 — Сводка выбранных категорий роботов
|
Категории роботов |
Назначение |
Пользователь |
Примеры |
|
Робот по персональному уходу |
Повышение качества жизни людей (на немедицинской основе) |
Непрофессионал (но не пациент) |
Автономный мобильный робот, который приносит предметы по запросу пользователя Самобалансирующийся тип персонального мобильного робота |
|
Медицинский робот |
Диагностика, лечение, наблюдение за пациентом; компенсация или облегчение болезни, травмы или увечья |
Пациент Медицинский работник |
Хирургический робот. Робот, перемещающий пациента между кроватью и креслом-каталкой |
|
Робот для домашних работ |
Выполнение работ по дому для людей |
Непрофессионал (но не пациент) |
Автономный пылесос Робот-газонокосилка |
|
Робот, используемый в промышленной среде |
Выполнение задач по промышленной автоматизации |
Рабочий |
Складской мобильный робот Сварочный робот |
ГОСТ Р 60.0.2.1 устанавливает общие требования безопасности применительно к любым типам роботов, ГОСТ Р 60.1.2.1 и ГОСТ Р 60.1.2.2 устанавливают требования безопасности для промышленных роботов и робототехнических комплексов, а ГОСТ Р 60.2.2.1 устанавливает требования безопасности для сервисных роботов по персональному уходу.
4.3 Указание по определению роботов по персональному уходу
Роботы по персональному уходу относятся к области применения ГОСТ Р 60.2.2.1. Они представляют подмножество сервисных роботов, повышающих качество жизни пользователей через непосредственное взаимодействие.
Требования ГОСТ Р 60.2.2.1 применимы к роботам по персональному уходу, которые повышают качество жизни людей независимо от их особенностей, возраста или пола (например, детей, престарелых людей, беременных женщин). Так как область применения роботов по персональному уходу достаточно широка, то лишь небольшая ее часть охватывалась рынком на время публикации ГОСТ Р 60.2.2.1. Учитывая существующий рынок, в ГОСТ Р 60.2.2.1 выбраны три наиболее коммерциализированных типов роботов по персональному уходу и определены требования безопасности конкретно для этих трех типов роботов, допуская при этом применение установленных требований к другим типам роботов по персональному уходу. Этими тремя типами роботов являются мобильный обслуживающий робот, робот для оказания физической помощи и робот для перевозки человека.
Повышение качества жизни, обеспечиваемое каждым из этих трех типов роботов, заключается в следующем:
— мобильные обслуживающие роботы обеспечивают своим пользователям сервисы, к которым относится предоставление информации, а также доставка разных объектов. Роль мобильных обслуживающих роботов можно сравнить с обслуживающим персоналом, таким как горничные, официанты, секретари или администраторы;
— роботы по оказанию физической помощи помогают человеку выполнять работу с помощью физической поддержки движений, включая поддержку веса пользователя, а также увеличение силы мускулов;
— роботы для перевозки человека транспортируют пользователей. Данные роботы могут быть спроектированы для перевозки одного человека или небольшой группы людей с ограниченной скоростью, как правило, в пешеходных зонах.
Некоторые роботы по персональному уходу совмещают свойства двух или более типов роботов, определенных в ГОСТ Р 60.2.2.1. К таким гибридным видам роботов относят следующие:
— экзоскелет, перевозящий человека (гибрид робота для оказания физической помощи и робота для перевозки человека);
— робот для перевозки человека, манипулирующий предметами и взаимодействующий с людьми (гибрид мобильного обслуживающего робота и робота для перевозки человека).
Для подобных гибридных роботов по персональному уходу важно тщательно определить все относящиеся к ним требования безопасности, свойственные двум или более типам роботов.
Одной из особенностей ГОСТ Р 60.2.2.1 по сравнению с ГОСТ Р 60.1.2.1 является физический диапазон риска при применении робота (см. ГОСТ Р 60.2.2.1-2016, 6.1.1). Диапазон применения промышленных роботов включает риски от низкого до высокого уровня, но большинство применений имеют высокий уровень риска. Роботы по персональному уходу имеют тенденцию к более непосредственному физическому контакту с людьми, чем промышленные роботы, поэтому на время публикации ГОСТ Р 60.2.2.1 существовала тенденция для изготовителей создавать больше роботов с низким уровнем риска. Данная тенденция на рынке роботов по персональному уходу отражена в форме интенсивного производства роботов с низким уровнем риска.
4.4 Указание по различию между роботами по персональному уходу и другими роботами
Существует несколько известных пересечений между ГОСТ Р 60.2.2.1 и другими стандартами. Такие пересечения допускают более двух интерпретаций категории робота применительно к одному роботу. Для минимизации двойных интерпретаций категория робота должна быть определена на основе использования рассматриваемого робота по назначению. Назначения четырех самых распространенных на рынке категорий роботов представлены в таблице 1. Ниже приведены примеры идентификации категории робота на основе его назначения:
— носимый робот для диагностики, лечения или обследования пациента, либо для компенсации или облегчения заболевания, травмы или недееспособности считают «медицинским роботом» (см. ГОСТ Р МЭК 60601-1). Такой же носимый робот может быть отнесен к категории «роботов для оказания физической помощи» (ГОСТ Р 60.2.2.1-2016, 3.15), если его используют иначе, например, робот-экзоскелет, помогающий медицинскому работнику переносить пациента;
— мобильный робот для транспортировки деталей на сборочную линию может быть отнесен к категории «робот, используемый в промышленной среде». Такой же робот может быть отнесен к категории «мобильный обслуживающий робот» (ГОСТ Р 60.2.2.1-2016, 3.14), если его используют иначе, например, в качестве мобильного робота для поиска и доставки предметов в домашних условиях;
— носимый робот, помогающий заводскому рабочему при установке двери автомобиля в производственном помещении, может быть отнесен к категории «робот, используемый в промышленной среде». Такой же робот может быть отнесен к категории «робот для оказания физической помощи», если его используют иначе, например, чтобы минимизировать усталость заводского рабочего, не выполняющего задач промышленной автоматизации.
Как правило, в интересах изготовителя роботов определить единственную категорию, к которой принадлежит конкретный робот. При этом только необходимо выполнить требования безопасности для данной категории и избежать противоречащих требований других стандартов. Если конкретный робот может быть отнесен к нескольким типам, то изготовитель выбирает тип робота, его использование по назначению, условия использования и ограничения на использование.
Если робот предназначен для использования в разных целях, то обычно данный робот считают относящимся к нескольким типам роботов. Одним из примеров является автономный мобильный робот, способный приносить еду и напитки («мобильный обслуживающий робот»), а также координировать и раздавать лекарства пациентам («медицинский робот»), В данном случае следует рассмотреть, как стандарты, применимые к медицинским приборам, так и стандарты для машин и механизмов.
Примечание — Если робот спроектирован так, что его программное обеспечение может быть изменено, то важно, чтобы изготовитель определил границы использования и выбрал применимые стандарты безопасности в соответствии с процессом оценки риска. Если изменение программного обеспечения приводит к нарушению установленных границ (например к использованию немедицинского робота для выполнения медицинских задач), то сторона, ответственная за такое изменение, выполняет новую оценку риска в соответствии с ГОСТ ISO 12100 (или другого применимого стандарта).
Ниже приведены примеры, показывающие необходимость выяснения ограничений роботов по персональному уходу и других изделий:
— к транспортному средству без водителя, которое может быть классифицировано как робот для перевозки человека, если его скорость ограничена 20 км/час, применимы требования ГОСТ Р 60.2.2.1;
— к роботу для перевозки человека, классифицируемому как транспортное средство, если он используется на общественных дорогах, применимы нормы для транспортных средств;
Примечание — Для определения применимости стандартов в случае конфликта требований, изготовитель для уточнения ограничений может запросить консультацию у третьей стороны, уполномоченной оказывать консультационные услуги. Такие услуги могут оказывать организации, аккредитованные в соответствии с ГОСТ ISO/IEC 17025.
Разумно прогнозируемые неправильные использования идентифицируют при оценке риска в соответствии с ГОСТ ISO 12100. Конструкция робота может быть изменена, чтобы снизить вероятность предсказуемых неправильных использований. Если их не удается исключить, то следует определить использования по назначению и ограничения на использование робота по персональному уходу.
5 Концепции, содержащиеся в ГОСТ Р 60.2.2.1
5.1 Общие положения
В ГОСТ Р 60.2.2.1 рассмотрены проблемы безопасности, отличающиеся от проблем безопасности, относящихся к медицинским и промышленным роботам. К основным различиям между роботами по персональному уходу и другими типами роботов относятся следующие:
— роботы по персональному уходу обычно являются мобильными и работают среди людей без разделительных ограждений;
— взаимодействия между человеком и роботом, включая физические контакты, часто являются существенной частью заданий, выполняемых роботом;
— роботы по персональному уходу часто имеют некоторую степень автономности, что позволяет им действовать и принимать решения без вмешательства человека.
5.2 Взаимодействие без ограждений
Роботов по персональному уходу обычно проектируют для работы среди людей, разделяя с ними общее рабочее пространство. Кроме того, роботы по персональному уходу обычно являются мобильными. В результате защитные устройства обычно устанавливают на роботе по персональному уходу или они могут быть интегрированы с ним, но не устанавливают во внешней среде. Рабочие зоны и зоны, защищенные защитными устройствами, а также функции безопасности определяют относительно мобильного персонального робота.
Благодаря более тесному взаимодействию с людьми, защитная остановка не считается единственной возможностью достичь безопасного состояния. Большую гибкость можно достичь, если робот регулирует свою скорость в зависимости от расстояния и относительной скорости препятствий. Чтобы обеспечить безопасное взаимодействие, могут быть применены функции безопасности, такие как управление скоростью, связанное с безопасностью, и исключение столкновений. Требования к характеристикам системы управления такими функциями безопасности приведены в ГОСТ Р 60.2.2.1-2016, 6.4 и 6.5.
5.3 Намеренный физический контакт
Физический контакт с пользователем часто необходим для выполнения задания роботом по персональному уходу. Это особенно свойственно роботам для оказания физической помощи, у которых усилия прикладываются непосредственно к частям тела человека, но это также присуще роботам для перевозки человека, которые находятся в постоянном контакте с перевозимым ими человеком. Мобильные обслуживающие роботы имеют временный физический контакт, например, при передаче предметов.
При проектировании робота и оценке риска важно, чтобы разработчик делал различие между намеренной и ненамеренной формами физического контакта. Для намеренного контакта важно ограничить контактные усилия и удары до уровня, позволяющего взаимодействовать с пользователем без боли или дискомфорта. Стратегию или процесс обычно разрабатывают для управляемого вхождения в физический контакт и выхода из него. Важно избегать ненамеренного контакта, особенно нанесения вреда при столкновениях и защемлениях с большой силой или с ударом.
Требования к характеристикам системы управления функцией управления усилием, связанной с безопасностью, которые следует соблюдать, чтобы обеспечить допустимое физическое взаимодействие, установлены в ГОСТ Р 60.2.2.1-2016, 6.6.
5.4 Автономные функции
Роботов по персональному уходу во многих случаях наделяют автономными функциями. ГОСТ Р 60.2.2.1 делает различие между автономной и полуавтономной работой (см. ГОСТ Р 60.2.2.1-2016, 6.10). В автономном режиме частота взаимодействия с человеком очень низка, например, когда мобильный обслуживающий робот самостоятельно выполняет такую работу по дому, как уборка или приготовление напитков. В полуавтономном режиме пользователь и робот взаимодействуют часто, но человек не управляет роботом напрямую.
Пример — Пользователь управляет основным направлением движения робота для перевозки человека, при этом робот самостоятельно осуществляет обход препятствий и управление устойчивостью.
Так как уровень автономности роботов по персональному уходу все еще достаточно низок и часто ограничен простыми автономными решениями, ГОСТ Р 60.2.2.1 предполагает, что изготовитель несет полную ответственность за автономные действия робота. Робот не может сам отвечать за свои действия, не может и пользователь отвечать за вред, нанесенный автономными решениями при использовании робота по назначению. Важно, чтобы изготовитель робота по персональному уходу тщательно обдумал, какие действия и решения могут быть выполнены роботом автономно без какого-либо неприемлемого риска нанесения вреда. Дальнейшее руководство по данной проблеме приведено в ГОСТ Р 60.2.2.1-2016, 5.12.
Ожидается, что в дальнейшем автономность роботов по персональному уходу будет возрастать и содержать более сложные автономные действия и решения. Поэтому вероятно, что соответствующий раздел ГОСТ Р 60.2.2.1 будет расширен в будущих редакциях.
6 Методология
6.1 Методология ГОСТ Р 60.2.2.1 по снижению риска в контексте других стандартов безопасности
Процесс оценки риска и снижения риска показан на рисунке 2, который модифицирован относительно ГОСТ ISO 12100-2013, рисунок 1, внесением дополнительной информации для пользователей ГОСТ Р 60.2.2.1, включая приоритет порядка применения мер по снижению риска.
|
|
Рисунок 2 — Схематичное представление процесса снижения риска с дополнительной информацией для пользователей ГОСТ Р 60.2.2.1
Как показано на рисунке 2, первым шагом является определение ограничений робота и тем самым внешней среды, а также использование контекста или приложения, в котором работает робот. На основании этих ограничений выполняют идентификацию опасностей и предварительную оценку риска, связанного с идентифицированными опасностями. Снижение риска необходимо, если оценка степени риска показала, что риск снижен недостаточно. Ответственностью изготовителя является определение приемлемого риска. Приемлемый риск можно трактовать как уровень риска, принятый в данном контексте на основе текущих ценностей общества.
Снижение риска выполняют в соответствии с трехэтапным методом, показанным на рисунке 2, для всех рисков, по которым необходимо снижение риска. Первым этапом является снижение риска с помощью мер конструирования с встроенной безопасностью. Второй этап (снижение риска с помощью ограждений или дополнительных защитных мер) может быть выполнен только в том случае, если первый этап не применим или необходимое снижение риска не может быть достигнуто применением мер первого этапа. Третий этап также не применяют без выполнения первого и второго этапов.
Процесс снижения риска всегда является итеративным. После применения всех мер, остаточный риск снова оценивают для определения того, снижен ли риск в достаточной степени. Данные этапы повторяют до тех пор, пока все остающиеся риски не будут снижены в достаточной степени.
При идентификации опасностей в качестве контрольного перечня следует использовать список существенных опасностей, представленный в ГОСТ Р 60.2.2.1-2016, приложение А. Данный список не является исчерпывающим и не обязательно учитывает все опасности, связанные с конкретным роботом по персональному уходу. В качестве дополнения для идентификации менее общих опасностей можно использовать более широкий список опасностей, представленный в ГОСТ ISO 12100-2013, приложение В.
ГОСТ Р 60.2.2.1-2016, раздел 5, структурирован так, что соответствующие меры для трех этапов снижения риска представлены для каждой конкретной опасности в последующих подразделах следующим образом:
— 5.Х.2 Конструкция со встроенной безопасностью;
— 5.Х.3 Основные и дополнительные защитные меры;
— 5.Х.4 Информация по использованию.
Это позволяет пользователю принять во внимание все возможные меры по снижению риска и выбрать надлежащие меры в соответствии с приоритетами, определенными в ГОСТ ISO 12100.
Примечание — Другие меры помимо тех, которые приведены в ГОСТ Р 60.2.2.1-2016, 5.Х.2-5.Х.4, могут быть выбраны для снижения риска, если они считаются подходящими.
Когда для снижения риска применяют функции безопасности, используя часть системы управления, связанную с безопасностью, применяют ГОСТ Р 60.2.2.1-2016, раздел 6, с каждой функцией безопасности, реализуемой с достаточно высоким уровнем эффективности защиты (УЭЗ). Определения УЭЗ и категорий архитектуры управления даны в ГОСТ ISO 13849-1. Перед применением ГОСТ Р 60.2.2.1-2016, раздел 6, пользователям настоятельно рекомендуется ознакомиться с принципами и методологией, описанными в ГОСТ ISO 13849-1.
Примечание — В настоящем стандарте УЭЗ используется для оценки системы управления, связанной с безопасностью, в соответствии с ГОСТ ISO 13849-1. Однако, уровень полноты безопасности (УПБ), определенный в ГОСТ Р МЭК 62061, также может быть применен для той же цели.
ГОСТ Р 60.2.2.1 требует, чтобы требуемый уровень эффективности защиты для конкретной функции безопасности определялся с помощью оценки риска с учетом ожидаемой вероятности и серьезности вреда. ГОСТ Р 60.2.2.1-2016, раздел 6, содержит рекомендации по УЭЗ для типичных функций безопасности типичных типов роботов. Однако, рекомендации в ГОСТ Р 60.2.2.1 служат только в качестве руководства и не являются заменой для пользователей при определении УЭЗт для их конкретных роботов. По сравнению с рекомендуемым УЭЗ, УЭЗт, установленный пользователем, может быть выше или ниже.
Если УЭЗт установлен выше, то конкретный робот по персональному уходу имеет более высокие риски, чем риски для типичных примеров роботов по персональному уходу, показанные в ГОСТ Р 60.2.2.1. Изготовителю необходимо выполнить все требования ГОСТ ISO 13849-1 для снижения этих более высоких рисков.
Если УЭЗт установлен ниже, то конкретный робот по персональному уходу может иметь более низкие риски, чем риски для типичных примеров роботов по персональному уходу, показанные в ГОСТ Р 60.2.2.1. Однако, необходимо подтвердить, что существуют веские причины для данного результата предварительной оценки риска. Эти причины должны быть тщательно задокументированы в технической документации данного робота для дальнейшего анализа.
Ожидаемые функции управления, связанные с безопасностью, роботов по персональному уходу использованы в качестве заголовков из ГОСТ Р 60.2.2.1-2016, 6.2-6.11. В каждом подразделе приведены требования к системе управления, связанной с безопасностью, с ожидаемым УЭЗ.
ГОСТ Р 60.2.2.1 разделяет каждый тип роботов на подтип с высоким риском и подтип с низким риском для каждого примера типа робота. Выбор какого-либо подтипа определяет разные рекомендации для УЭЗт, которые обычно основываются на выборе высокой или низкой ожидаемой суровости графика соответствующего риска. Данная дифференциация служит дополнительным руководством для пользователя. Однако, это не является заменой выполнения оценки риска для определения УЭЗт для каждой функции безопасности. На практике, робот, который на первый взгляд кажется соответствующим определению «с низким риском», может потребовать функций безопасности с высоким УЭЗ после тщательной проверки. Подтип робота может быть изменен с помощью реализации мер по конструированию со встроенной безопасностью.
6.2 Подход, адаптированный для рабочих примеров
Раздел 7 содержит рабочие примеры по формированию руководства для следующих случаев:
— последовательность шагов по оценке риска и генерации таблицы оценки риска;
— применение методологии снижения риска, установленной в ГОСТ ISO 12100;
— применение УЭЗ безопасности для функции системы управления, связанной с безопасностью, в соответствии с ГОСТ ISO 13849-1;
— соответствие конкретным требованиям безопасности по ГОСТ Р 60.2.2.1.
Каждый рабочий пример показывает, как следует использовать правила из ГОСТ Р 60.2.2.1 для идентификации правильного подтипа робота и показывает процесс идентификации требуемых УЭЗ для его функций безопасности. В частности, приведена следующая информация:
— представление общих характеристик робота, существенных для оценки риска, таких как архитектура системы, спецификации, рабочая среда, сценарии типичного использования, включая степень автономности выполнения конкретных задач, и определение подтипа робота (оценка, связанная с габаритами/оценка, связанная с массой/оценка, связанная со скоростью/оценка, связанная с усилием или мощностью и т.д.);
— определение ограничений для робота по персональному уходу, включая предсказуемые неправильные использования. Пример предварительной оценки начального риска для нескольких выбранных рисков и опасностей. Таблицы содержат, по крайне мере, одну меру снижения риска, связанную с функцией управления. Таблица включает опасность, потенциальные последствия, опасное событие, предварительную оценку и оценку степени начального риска, а также связь с ГОСТ Р 60.2.2.1-2016, раздел 5;
— выбор встроенных мер безопасности, средств защиты для опасностей, а также выработка информации по использованию для большинства важных рисков и опасностей, представленных в таблице оценки начального риска. Таблица оценки риска после принятия мер по снижению риска, была применена для рисков и опасностей в таблице оценки начального риска. Следует обратить внимание то, что какая-нибудь мера может вызвать новую опасность. Данную процедуру повторяют до тех пор, пока все идентифицированные риски не будут достаточно снижены;
— идентификация функций управления, связанных с безопасностью, используемых для защитных мер, и определение УЭЗт для идентифицированных функций управления.
Элементы, перечисленные в ГОСТ ISO 12100-2013, В.1-В.4, представляют собой типы опасности, их происхождение и их потенциальные последствия, которые должны быть идентифицированы до предварительной/окончательной оценки риска. Кроме того, в данных разделах представлены опасные ситуации и опасные события.
Для облегчения восприятия рабочие примеры в разделе 7 не содержат подробной информации о происхождении опасностей и опасных ситуациях. Происхождения опасностей и опасные ситуации неявно присутствуют в графе «опасность и опасное событие», которая содержит причину и воздействие, приводящее к потенциальному последствию.
Примеры, приведенные в настоящем стандарте, не предназначены для охвата всех рисков, а демонстрируют только некоторые конкретные случаи. Предварительная оценка и оценка степени риска для каждого примера показаны на рисунке 3. При определении УЭЗт для каждого примера применяют методологию, показанную на рисунке 4. В настоящем стандарте использованы раздельные графики риска для предварительной оценки/оценки степени риска и определения УЭЗт функций безопасности для того, чтобы представить разные шаги для оценки риска и снижения риска в структурированном и понятном виде. Поскольку во всем процессе использованы два разных графика риска, следует обратить внимание на согласованность анализа между предварительной оценкой риска, приводящей к необходимости принятия мер по снижению риска, и предварительной оценкой риска для определения УЭЗт. Существуют и другие способы, которые не используют несколько графиков риска.
|
|
S1 — легкая травма (обычно обратимая); S2 — серьезная травма (обычно необратимая); F1 — редко/короткая продолжительность; F2 — часто/длительная продолжительность; O1 — низкая (очень мало вероятно); O2 — средняя (вероятно иногда происходит); O3 — высокая (вероятно происходит часто); A1 — возможно (человек может заметить и имеет время, чтобы избежать); A2 — невозможно
Примечания
1 Данный рисунок является примером для иллюстрации процедур применения ГОСТ Р 60.2.2.1. Он воспроизведен из [1], 6.3.2, который содержит более подробное пояснение альтернатив для S, F, O и A.
2 Индексы риска 1 и 2 соответствуют низкому риску, индексы риска 3 и 4 соответствуют среднему риску, а индексы риска 5 и 6 соответствуют высокому риску. Изготовитель решает до какого значения индекса риск еще является приемлемым, как правило, с обоснованием.
3 F, O и A вместе составляют «вероятность нанесения вреда».
Рисунок 3 — Предварительная оценка и оценка степени риска
|
|
Примечание — Критерий «F» определен раздельно для двух графиков риска, т.е. «F» и «O» на рисунке 3 соответствуют «F» на рисунке 4.
Рисунок 4 — Определение УЭЗт для функции безопасности
6.3 Применение рабочих примеров к другим роботам
Рабочие примеры для оценки риска и снижения риска основаны на предположениях для конкретной конструкции робота и сценария использования. Они предназначены для того, чтобы предоставить пользователям ГОСТ Р 60.2.2.1 руководства для их собственной оценки риска и снижения риска. Хотя данные примеры созданы как можно ближе к реальности, невозможно применить результаты данных примеров к любым другим роботам по персональному уходу, в частности, по следующим причинам:
— некоторые опасности и некоторые меры по снижению риска были опущены, чтобы сделать примеры краткими и понятными;
— разным конструкциям роботов по персональному уходу присущи разные риски, даже если они внешне выглядят похожими;
— даже идентичные роботы по персональному уходу имеют разные риски и требуют разных мер по снижению риска, если их используют в разной внешней среде или разные группы пользователей;
— важно тщательно проверить с помощью вычислений и практических испытаний способность ограждений или дополнительных защитных мер адекватно снизить риск.
7 Рабочие примеры
7.1 Методика описания
В разделе 7 приведены пошаговые процедуры выполнения оценки риска и снижения риска для роботов по персональному уходу, определенных в ГОСТ Р 60.2.2.1. Примеры, приведенные в разделе 7, представляют роботов по персональному уходу, уже присутствующих на рынке или готовых к выходу на рынок на время публикации данного стандарта. Примеры в разделе 7 соответствуют подходу, представленному в 6.2.
7.2 Мобильный обслуживающий робот (высокая степень риска)
7.2.1 Обзор
В данном примере представлен мобильный обслуживающий робот, предназначенный для выполнения заданий типа «найти и принести» в частных домах для оказания помощи престарелым людям.
Архитектура системы
Робот состоит из всенаправленного мобильного шасси на четырех колесах. На шасси установлен корпус с одной рукой. Рука оснащена трехпалым захватным устройством. У робота также есть складной поднос, на котором могут быть размещены разные объекты. Робот питается от литий-ионной батареи, расположенной на мобильном шасси.
Технические характеристики
Высота робота составляет около 1,5 м, а вес — 150 кг. Грузоподъемность захватного устройства 2 кг. Максимальная скорость перемещения робота 1 м/с. Напряжение батареи 48 В.
Рабочая среда
Мобильный обслуживающий робот предназначен для работы внутри помещений в домашней обстановке с ровным полом.
Типичные задания
Мобильный обслуживающий робот предназначен для выполнения следующих заданий:
— обнаружение и доставка объектов из мест, расположенных внутри квартиры (например, из кухни, с полки в гостиной, с прикроватного стола в спальне) по команде пользователя;
— получение объектов от пользователя и доставка их в нужное место (например, грязную чашку обратно на кухню, книгу обратно на книжную полку);
— разливание напитков из бутылок и доставка их сидящим или стоящим людям.
Выполнение заданий начинается по устной команде пользователя, по нажатию кнопки на пульте дистанционного управления (например, в приложении на смартфоне) или при установке объекта на поднос робота или взятии объекта с него.
Степень автономности
Мобильный обслуживающий робот работает почти полностью автономно (согласно ГОСТ Р 60.2.2.1-2016, 6.10). Получив команду, робот перемещается между комнатами, обходя препятствия, определяет местоположение объектов, берет их и доставляет пользователю без вмешательства человека.
Определение подтипа робота
Мобильный обслуживающий робот оснащен манипулятором. При весе 150 кг и высоте 1,5 м он не является ни маленьким, ни легким. Поэтому он классифицирован как мобильный обслуживающий робот с высоким риском (тип 1.2 по ГОСТ Р 60.2.2.1-2016, 6.1.2.1).
7.2.2 Оценка риска
7.2.2.1 Определение ограничений робота по персональному уходу
Мобильный обслуживающий робот управляется непрофессионалом в домашних условиях, выполняя упомянутые выше задания. Предполагается, что домашняя среда имеет ровную поверхность (твердое покрытие или ковер). Во время итеративного процесса оценки риска решено исключить другие опасности и сделать процесс предварительной оценки риска и снижения риска более легким.
Условия эксплуатации: отсутствие ступеней, а наклонные поверхности имеют угол наклона менее 5°.
Объекты, с которыми имеет дело робот, ограничены неопасными объектами. Острые объекты (например, ножи), очень горячие объекты или горящие объекты (например, горячие сковороды, зажженные свечи), тяжелые объекты (весом более 1 кг) или опасные вещества, такие как ядовитые жидкости (например, сильные чистящие средства) исключены из состава объектов, которыми манипулирует робот.
Роботом должны управлять взрослые люди, понимающие опасности, которые могут исходить от мобильного обслуживающего робота. Это исключает не только маленьких детей, но также людей с ухудшенными умственными способностями (например, престарелых людей, страдающих деменцией). Если в доме живут маленькие дети, то робот должен работать под присмотром взрослых.
Предсказуемое неправильное использование
Ожидается, что люди могут попытаться сесть на мобильное шасси, например, престарелые люди, из-за отсутствия поблизости стула, или дети для того, чтобы прокатиться на роботе. Это может повредить мобильное шасси или привести к серьезным травмам, если ребенок упадет с движущегося шасси и робот наедет на него.
Ожидается, что пользователь может использовать робота для доставки лекарств в виде таблеток или даже наливая в стакан небольшое количество жидкого лекарства. Это может привести к опасным ситуациям, если робот привезет неправильное лекарство или нальет неправильное количество жидкости. Более того, при наличии такой функциональности мобильный обслуживающий робот становится медицинским оборудованием, для выполнения роли которого он не предназначен.
Чтобы не позволить пользователям сесть на робота, все поверхности робота должны иметь форму, полностью исключающую сидение на нем, или, по крайней мере, делающую такое сидение очень неудобным. В информации для пользователей должны быть приведены указания не использовать робота ни одним из приведенных выше способов.
7.2.2.2 Идентификация исходной опасности и предварительная оценка риска
В таблице 2 представлены идентифицированные опасности, создаваемые мобильным обслуживающим роботом. Данный перечень опасностей основан на ГОСТ Р 60.2.2.1-2016, приложение А, используемого в качестве контрольной таблицы, и обсуждения каждой опасности из таблицы на предмет ее присутствия. Для краткости список ограничен десятью элементами, хотя возможно существуют и другие опасности. Кроме того, в таблице 2 показана предварительная оценка риска, происходящего от данных опасностей на основе графика риска на рисунке 3.
Таблица 2 — Оценка степени риска перед применением мер по снижению риска
|
Тип опасности |
Опасность и опасное событие |
Потенци- альное последствие |
Предварительная оценка риска: S: Серьезность вреда F: Частота воздействия O: Вероятность возникновения A: Возможность избежать R: Индекс риска |
Оценка степени риска |
Структурный элемент ГОСТ Р 60.2.2.1-2016 |
|
1 Элек- трическая |
Контакт человека с клеммами батареи |
Электрический шок, дискомфорт, ожог |
S1: 48 В не может оказать серьезного вреда F2: До робота часто дотрагиваются и клеммы могут быть случайно доступны O3: Можно ожидать ошибку непрофессионала A2: Детали под напряжением нельзя распознать до касания R: 2 |
Приемлемая в принципе, но отмечена для последующего снижения риска, т.к. вероятность возникновения вреда высока и существуют решения данной проблемы |
5.2 |
|
2 Меха- ническая |
Падение груза (из захватного устройства) в случае пропадания питания |
Раздавли- вание, другие опасности |
S1: Можно перевозить только неопасные объекты F1: Пропадание питания происходит редко O3: Объекты всегда выпадают из захватного устройства в случае пропадания питания A2: Выпадение происходит неожиданно R: 2 |
Приемлемая, но отмечена для последующего снижения риска, т.к. существуют решения данной проблемы |
5.3.3 |
|
3 Меха- ническая/ эргоно- мическая |
Робот не замечает, что работает в темноте и пугает пользова- теля |
Столкновения, престарелые люди спотыкаются и падают |
S2: Падающий престарелый человек может сломать кость F2: Робот может регулярно работать в темноте O1: Испуг человека с серьезными последствиями происходит очень редко A2: Робот не является заметным R: 4 |
Неприемлемая, т.к. серьезность и вероятность возникновения вреда высоки |
5.14 |
|
4 Элек- трическая |
Вода проливается на робота, например из доставля- емого напитка |
Электрический шок, короткое замыкание, вызывающее функциона- льные сбои (возгорание и задымление не рассматри- ваются) |
S1: 48 В не может оказать серьезного вреда F1: Проливание случается редко O2: Проливание редко вызывает такие последствия A2: Детали под напряжением нельзя распознать до касания R: 1 |
Приемлемая, т.к. последствия серьезности и вероятности возникновения вреда низки |
5.15 |
|
5 Меха- ническая |
Робот падает при слишком тяжелом грузе или в случае выполнения экстрема- льного маневра |
Удар по человеку |
S2: Серьезная травма, например вероятны переломы F1: Перегрузка или экстремальные маневры случаются редко O1: Центр тяжести расположен низко из-за тяжелой батареи A2: Падение происходит очень быстро, чтобы его избежать R: 2 |
Приемлемая, т.к. вероятность возникновения вреда низка и устойчивость робота заложена в его механической конструкции |
5.10.2, 5.10.3 |
|
6 Меха- ническая |
Груз падает (с подноса), когда робот резко остана- вливается |
Ударные, резаные травмы от осколков |
S1: Ограниченная серьезность, т.к. работа с опасными и тяжелыми объектами не рассматривается F2: Частое возникновение, т.к. остановка случается часто, когда пользователь оказывается перед роботом O3: Груз почти всегда падает при резкой остановке A2: Падение может произойти очень быстро, чтобы его избежать R: 2 |
Приемлемая в принципе, но отмечена для последующего снижения риска, т.к. вероятность возникновения вреда высока и существуют решения данной проблемы |
5.10.4 |
|
7 Меха- ническая |
Столкно- вение со взрослым человеком, включая престарелых людей |
Ударные и раздавли- вающие травмы |
S2: Робот достаточно тяжелый, чтобы вызвать необратимые травмы F2: Робот постоянно работает вблизи людей O2: Очувствление и обход препятствий обычно предотвращают столкновения A2: Особенно престарелые люди не могут избежать опасности R: 5 |
Неприемлемая, т.к. серьезность и вероятность возникновения вреда высоки |
5.10.8 |
|
8 Меха- ническая |
Столкно- вение с маленьким ребенком |
Ударные и раздавли- вающие травмы |
S2: Робот достаточно тяжелый, чтобы вызвать необратимые травмы F2: Робот постоянно работает вблизи людей O2: Очувствление и обход препятствий могут иметь проблемы при обнаружении маленького ребенка A2: Маленький ребенок не может избежать опасности R: 6 |
Неприемлемая, т.к. серьезность и вероятность возникновения вреда высоки |
5.10.8 |
|
9 Меха- ническая |
Столкно- вение с животным |
Ударные и раздавли- вающие травмы, животное может погибнуть |
S2: Животное может погибнуть F2: Робот постоянно работает вблизи животных O3: Очувствление и обход препятствий могут иметь проблемы при обнаружении маленьких животных A1: Большинство животных реагируют очень быстро R: 5 |
Неприемлемая, т.к. серьезность и вероятность причинения вреда высоки |
5.10.8 |
|
10 Меха- ническая, терми- ческая, хими- ческая, эргоно- мическая |
Взятие и доставка неправи- льных объектов из-за неправи- льной иденти- фикации объектов |
Ошпаривание, если робот неожиданно приносит горячие жидкости; отравление, если робот приносит ядовитые жидкости; порезы, если робот приносит острые объекты. Вторичные опасности, если такие объекты повреждены или разлиты |
S2: Опасные объекты могут причинить серьезные травмы F1: Робот работает с опасными объектами только в случае неправильного использования O3: Опыт показывает, что идентификация рассматриваемых объектов всегда имеет неопределенности A1: В большинстве случаев выявляется пользователем R: 3 |
Приемлемая, если предоставлено предупреждение о неправильном использовании, включая руководство по структуриро- ванию окружающей среды для минимизации неправильного использования |
5.12 |
Дополнительную информацию по идентифицированным опасностям можно найти в ГОСТ Р 60.2.2.1-2016, раздел 5.
Примеры
1 Для примеров с упавшими грузами (строки 2 и 6 таблицы 2) ГОСТ Р 60.2.2.1-2016, 5.10.4.1, содержит следующие требования:
«Любой человек, находящийся вблизи робота по персональному уходу, должен быть защищен от падения связанных с безопасностью объектов при выполнении роботом заданий, а также при переносе максимальных грузов. Это относится и к неровным и подвижным грузам (например, колебания жидкостей в контейнерах).
При общей оценке рисков необходимо рассмотреть последствия падения грузов и любые действия, требуемые от робота по персональному уходу в результате любого подобного события.
Для аварийного режима работы величина максимального торможения должна соответствовать динамическим критериям аварийного останова, включая требования по устойчивости и сохранению груза.»
Следовательно, опасности из строк 2 и 6 следует рассмотреть повторно для того, чтобы изучить действия, необходимые после того, как груз уже упал, и определить риск от упавших грузов в случае аварийных остановок.
2 Для опасности, связанной с отсутствием информированности (строка 3), ГОСТ Р 60.2.2.1-2016, 5.14.1, содержит следующие требования:
«Если общая оценка рисков показывает, что отсутствие у людей информированности о роботах представляет опасность, например, когда беззвучная работа робота может повысить вероятность столкновения с людьми, робот по персональному уходу должен издавать заметный звук для уменьшения риска без нарушения других ограничений по шуму.»
Заметный шум, создаваемый роботом, представляется предпочтительной мерой по снижению риска при отсутствии информированности.
7.2.2.3 Меры по снижению риска
При общей оценке риска идентифицируют опасности, приводящие к неприемлемому риску или к риску, который должен быть снижен. В таблице 3 показаны три выбранные опасности, к которым применяют меры для снижения риска.
Таблица 3 — Меры по снижению риска для трех выбранных опасностей
|
Опасность и опасное событие |
Потенциальное последствие |
Меры конструирования со встроенной безопасностью |
Ограждение или дополнительные защитные меры |
Информация по использованию |
|
3 Робот не замечает, когда работает в темноте |
Испуг пользова- теля, столкно- вения, спотыкание и падение престарелых людей |
Шум от двигателей и редукторов заметный, но не очень громкий. В домашних условиях ночью обычно тихо, поэтому предполагается, что данный звук заметен во всех ситуациях. Дальнейшее повышение уровня звука может потревожить пользователя и поэтому недопустимо |
Заметность робота повышается при установке светодиодных светильников на его корпусе, встроенных в визуальный образ робота. Поэтому робот может быть хорошо заметным при работе в темной комнате (см. ГОСТ Р 60.2.2.1-2016, 5.14.2, 5.14.3) |
Инструкция по проверке работоспособности светодиодных светильников при каждом запуске робота и по ремонту неработающих светильников |
|
6 Груз падает при резкой остановке робота |
Ударные и резаные травмы от осколков |
По краям подноса установлены бортики для предотвращения соскальзывания объектов. Такая конструкция также задерживает пролитую жидкость. Кроме того, поверхность подноса покрывают резиной с высоким коэффициентом трения (см. ГОСТ Р 60.2.2.1-2016, 5.10.4.2) |
Дополнительную рекомендацию включают в руководство пользователя, информирующую об объектах, которые при перевозке могут вызвать проблемы, поэтому их следует избегать. В руководство пользователя включают рекомендацию удалить пролитые жидкости перед тем, как робот возобновит работу |
|
|
7, 8, 9 Столкновение с человеком, включая престарелых людей, столкновение с маленьким ребенком или столкновение с животным |
Ударные и раздавливающие травмы |
Двигатели и редукторы мобильного шасси выбирают так, чтобы они не позволяли роботу двигаться со скоростью более 1 м/с. Это уменьшает общую кинетическую энергию робота (см. ГОСТ Р 60.2.2.1-2016, 5.10.8.2). Манипулятор выбирают так, чтобы у него не было большей мощности, чем требуется для поднятия груза с максимальным весом 1 кг (см. ГОСТ Р 60.2.2.1-2016, 5.10.8.2). В целом, ожидаемая серьезность вреда может быть снижена с помощью данных мер. Поскольку кинетическая энергия снижена, дистанции остановки компонентов робота могут быть значительно сокращены |
Робот оснащают трехмерными датчиками для ориентации во внешней среде и планирования маршрута движения свободного от столкновений. Тем не менее, данные функции реализуют в потенциально небезопасном программном обеспечении, что не позволяет достичь необходимого УЭЗ для снижения риска. Для того, чтобы избежать столкновений, мобильное шасси оснащают лазерными сканерами для определения присутствия людей вокруг робота (см. ГОСТ Р 60.2.2.1-2016, 5.10.8.3). Чувствительность лазерных сканеров устанавливают на уровень, обеспечивающий определение присутствия частей тела диаметром 30 мм. |
Риск и примененные меры защиты описывают в руководстве пользователя, чтобы повысить информированность об опасностях, связанных со столкновениями. Пользователям рекомендуют находиться на расстоянии от подвижных частей робота. Пользователей информируют о риске, когда небольшие животные не распознаются роботом. Рекомендуется не использовать робота в помещениях, где присутствуют небольшие животные, например, грызуны |
|
Это позволяет определять присутствие рук и кистей маленьких детей, а также многих животных. Лазерные сканеры размещают ближе к полу, чтобы дети и животные, лежащие на полу, могли быть обнаружены. |
||||
|
Лазерный сканер, расположенный близко к полу, не может обнаружить лежащих или сидящих людей, ноги которых не касаются пола. Манипулятор и части корпуса робота оснащают тактильной оболочкой, останавливающей движение робота при столкновении (см. ГОСТ Р 60.2.2.1-2016, 5.10.8.3). В экспериментальных тестах проверяют, что толщина тактильной оболочки должна быть достаточной для предотвращения вреда от чрезмерной силы удара |
7.2.2.4 Окончательная оценка риска и остаточный риск
После применения всех мер по снижению риска следует произвести окончательную оценку риска, чтобы определить было ли снижение риска успешным и установить остаточный риск. В таблице 4 показаны только опасности, выбранные в 7.2.2.3.
Таблица 4 — Окончательная оценка риска
|
Тип опасности |
Опасность и опасное событие |
Потенциальное последствие |
Предварительная оценка риска: S: Серьезность вреда F: Частота воздействия O: Вероятность возникновения A: Возможность избежать R: Индекс риска |
Оценка степени риска |
Структурный элемент ГОСТ Р 60.2.2.1-2016 |
|
3 Меха- ническая/ эргоно- мическая |
Робот не замечает, что работает в темноте |
Вред от испуга пользователя, столкновений, падения престарелых людей устранен |
S2: Падающий престарелый человек может сломать кость F2: Робот может регулярно работать в темноте O1: Робот заметен и не может напугать кого-либо A2: Робот является заметным R: 3 |
Приемлемая, т.к. вероятность возникновения вреда ограничена низким уровнем |
5.14 |
|
6 Меха- ническая |
Груз падает (с подноса), когда робот резко останав- ливается |
Ударные, резаные травмы от осколков |
S1: Ограниченная серьезность, т.к. работа с опасными и тяжелыми объектами не разрешена F2: Частое возникновение, т.к. остановка случается часто, когда пользователь оказывается перед роботом O2: Вероятность падения груза снижена A2: Падение может произойти очень быстро, чтобы его избежать R: 1 |
Приемлемая, т.к. были реализованы существу- ющие меры по ограничению вероятности причинения вреда |
5.10.4 |
|
7 Меха- ническая |
Столкно- вение со взрослым человеком, включая престаре- лых людей |
Ударные и раздавли- вающие травмы |
S2: Робот достаточно тяжелый, чтобы вызвать необратимые травмы F2: Робот постоянно работает вблизи людей O1: Столкновения эффективно предотвращены с помощью мер безопасности A2: Особенно престарелые люди не могут избежать опасности R: 4 |
Приемлемая, т.к. принятые меры безопасности достаточно и эффективно ограничивают вероятность нанесения вреда |
5.10.8 |
|
8 Меха- ническая |
Столкно- вение с маленьким ребенком |
Ударные и раздавли- вающие травмы |
S2: Робот достаточно тяжелый, чтобы вызвать необратимые травмы F2: Робот постоянно работает вблизи людей O1: Столкновения с детьми эффективно предотвращены с помощью изменения расположения и повышения чувствительности защитных устройств A2: Маленький ребенок не может избежать опасности R: 4 |
Приемлемая, т.к. принятые меры безопасности достаточно и эффективно ограничивают вероятность нанесения вреда |
5.10.8 |
|
9 Меха- ническая |
Столкно- вение с животным |
Ударные и раздавливающие травмы, животное может погибнуть. Моральный дискомфорт для владельца животного |
S2: Животное может погибнуть F2: Робот постоянно работает вблизи животных O2: Столкновения с большими животными предотвращены с помощью изменения расположения и повышения чувствительности защитных устройств. Маленькие животные все еще могут погибнуть, но пользователям дана инструкция держать животных подальше от робота A1: Большинство животных реагируют очень быстро R: 4 |
Приемлемая, т.к. вероятность причинения вреда эффективно снижена для большинства животных, свободно перемещаю-щихся по дому и при условии, что даны предосте- режения не позволять маленьким животным находиться вблизи робота |
5.10.8 |
7.2.3 Система управления, связанная с безопасностью
В процессе снижения риска применяют две меры безопасности, являющиеся частью связанной с безопасностью системы управления. Как использование лазерных сканеров, так и использование тактильной оболочки являются защитными мерами для того, чтобы избежать опасного столкновения. При обнаружении препятствия робот выполняет защитную остановку. Более того, мобильный обслуживающий робот оснащен кнопками аварийной остановки, расположенными на внешней поверхности корпуса. В ГОСТ Р 60.2.2.1 перечислены все функции безопасности для рекомендованного УЭЗ уровня d в соответствии с ГОСТ Р 60.2.2.1-2016, таблица 1, тип 1.2. В таблице 5 требуемые характеристики системы управления подтверждены в соответствии с графиком риска из ГОСТ ISO 13849-1.
Таблица 5 — Функция безопасности и заданный УЭЗ
|
Функция безопасности |
Рекомендованный УЭЗ в соответствии с ГОСТ Р 60.2.2.1-2016, таблица 1 |
УЭЗ в соответствии с ГОСТ ISO 13849-1: S: Серьезность травмы F: Частота и/или длительность опасности P: Вероятность избегания опасности или ограничения вреда |
Структурный элемент ГОСТ Р 60.2.2.1-2016 |
|
I Аварийная остановка |
d |
S2: Столкновения могут вызвать серьезную травму F1: Аварийная остановка используется не часто P2: Если авария уже случилась, то уклонение вряд ли возможно УЭЗт: d |
6.2.2.2 |
|
III Предотвращение опасных столкновений (шасси и корпус/лазерный сканер) |
d |
S2: Столкновения с шасси и корпусом могут вызвать серьезную травму F1: Очувствление и планирование маршрута обычно предотвращают столкновения, поэтому меры безопасности активируют не часто P2: Части робота могут двигаться так быстро, что нельзя уклониться от столкновения УЭЗт: d |
6.5.2.1 |
|
IV Предотвра-щение опасных столкновений (манипулятор и захватное устройство/ тактильная оболочка) |
d |
S2: Столкновения с манипулятором и захватным устройством могут вызвать серьезную травму F1: Очувствление и планирование маршрута обычно предотвращают столкновения, поэтому меры безопасности активируют редко P2: Части робота могут двигаться так быстро, что нельзя уклониться от столкновения УЭЗт: d |
6.5.2.2 |
Как аварийная остановка, так и защитная остановка могут быть реализованы с помощью отключения питания двигателей (категория остановки 0 в соответствии с ГОСТ IEC 60204-1). Защитная остановка может быть категории 2 (в соответствии с ГОСТ IEC 60204-1), если риски безопасно контролируются. Однако обе функции могут обрабатываться раздельно в системе управления, т.к. защитная остановка может быть снята автоматически, если препятствия больше не видно. Для аварийной остановки допустим только ручной режим продолжения работы (см. ГОСТ Р 60.2.2.1-2016, 6.2.2.1).
7.3 Мобильный обслуживающий робот (низкая степень риска)
7.3.1 Обзор
В данном примере представлен робот для развлечений и предоставления информации в домах престарелых, домах для детей с нарушением умственных способностей и других подобных заведениях. Робот может играть в разные игры с группой людей. Он предлагает исполнить музыку и спеть вместе для развлечения. Более того, пользователи могут запросить у робота информацию, например, время начала и место проведения запланированных мероприятий в данном заведении.
Архитектура системы
Робот состоит из всенаправленного мобильного шасси на трех колесах. У робота есть две руки с тремя степенями подвижности каждая, которые не приспособлены для манипулирования, а используются для взаимодействия с человеком (например, для пожимания рук) и для выражения эмоций робота с помощью жестикуляций. Голова робота дисплейного типа имеет две степени подвижности для выражения эмоций. Робот питается от литий-ионной батареи, которая заряжается от сети. Роботом можно управлять и контролировать его действия с помощью внешнего устройства (например, с помощью мобильного телефона или планшета).
Технические характеристики
Габариты робота 480 мм (ширина)
520 мм (длина)
1148 мм (высота), а вес составляет около 21 кг. Максимальная скорость перемещения робота 0,6 м/с. Максимальный уровень шума при движении робота около 60 дБ. Тактильные датчики на концах рук служат для взаимодействия с человеком. Робот оснащен лазерным сканером, стереокамерой, ПЗС-камерой, гироскопическим датчиком и ультразвуковыми датчиками для навигации и предотвращения столкновений с объектами внешней среды.
Рабочая среда
Робот предназначен для работы внутри помещений в домах, больницах, домах престарелых, классных помещениях с ровным полом.
Типичные задания
Робот по персональному уходу предназначен для выполнения следующих заданий:
— игра в игры с группой пользователей, включая разговор, жестикуляцию, перемещение по комнате и распознавание людей и объектов;
— музицирование и пение с группой людей;
— ответы на вопросы и предоставление информации;
— взаимодействие с пользователями через смартфон или речь;
— эмоциональное взаимодействие с использованием рук, колес, светодиодов, трехмерного графического аватара и звука;
— жестикуляция руками, когда пользователь должен повторить движения робота.
Выполнение заданий можно инициировать с помощью устройства дистанционного управления (например, смартфона).
Степень автономности
Мобильный обслуживающий робот работает почти полностью в автономном режиме (согласно ГОСТ Р 60.2.2.1-2016, 6.10). Получив команду, робот перемещается внутри помещения, обходя препятствия.
Определение подтипа робота
Робот оснащен руками, но они используются только для жестикуляции. Мощность двигателей и масса рук достаточно небольшие, поэтому при их движении никакого дополнительного риска не возникает. При габаритах 800 мм в высоту, 400 мм в ширину и 450 мм в длину, весе 21 кг и скорости 0,6 м/с, робот является небольшим, легким и тихоходным. Поэтому он классифицирован как мобильный обслуживающий робот с низким уровнем риска (тип 1.1 по ГОСТ Р 60.2.2.1-2016, 6.1.2.1).
Хотя робот используется престарелыми людьми (возможно страдающими деменцией), людьми с ограниченными возможностями или детьми, данный робот не считается медицинским устройством, т.к. он не предназначен для диагностики, лечения или наблюдения за пациентом, компенсации или облегчения болезни, травмы или нетрудоспособности.
7.3.2 Оценка риска
7.3.2.1 Определение ограничений робота по персональному уходу
Рабочая среда должна иметь ровную поверхность (твердое покрытие или ковер). Во время итеративного процесса общей оценки риска решено исключить другие опасности и сделать процесс предварительной оценки риска и снижения риска более легким.
Условия эксплуатации: отсутствие ступеней, а наклонные поверхности имеют угол наклона менее 5°.
Пользователь должен быть проинструктирован о необходимости поворачивать или сгибать руки робота с целенаправленным усилием.
Настраивать и наблюдать за роботом должны только взрослые люди, полностью понимающие опасности, которые могут исходить от мобильного обслуживающего робота. Однако робот может взаимодействовать с маленькими детьми и престарелыми людьми, например, страдающими деменцией. Робота следует использовать под присмотром взрослых здравомыслящих людей.
Предсказуемое неправильное использование
Ожидается, что люди могут попытаться сесть на робота или положить на него груз, например, престарелые люди, из-за отсутствия поблизости стула или дети для того, чтобы прокатиться на роботе. Это может повредить робота или привести к травмам, если ребенок упадет с робота.
Если во время зарядки робота пользователь двигает голову, руки или корпус робота, то это может привести к возникновению опасных ситуаций.
Ожидается, что робот может быть неправильно использован для предоставления информации о лекарствах или медицинском лечении. Это как бы делает робота медицинским устройством, для выполнения роли которого он не предназначен. Робот не должен быть использован для диагностики, лечения или наблюдения за пациентом, компенсации или облегчения болезни, травмы или нетрудоспособности.
Кроме того, ожидается, что пользователь может поместить робота на стол или на платформу для того, чтобы группа пользователей могла лучше его видеть. Чтобы избежать опасности от падения робота, данный робот не может быть использован таким образом. Как указано выше, данный робот может работать только на ровном полу без каких-либо ступеней.
7.3.2.2 Идентификация исходной опасности и предварительная оценка риска
В таблице 6 представлены идентифицированные опасности, создаваемые мобильным обслуживающим роботом. Данный перечень опасностей основан на ГОСТ Р 60.2.2.1-2016, приложение А, используемого в качестве контрольной таблицы, и обсуждения каждой опасности из таблицы на предмет ее присутствия. Для краткости список ограничен семью элементами, хотя возможно существуют и другие опасности. Кроме того, в таблице 6 показана предварительная оценка риска, происходящего от данных опасностей на основе графика риска на рисунке 3.
Таблица 6 — Оценка степени риска перед применением мер по снижению риска
|
Тип опасности |
Опасность и опасное событие |
Потенциальное последствие |
Предварительная оценка риска: S: Серьезность вреда F: Частота воздействия O: Вероятность возникновения A: Возможность избежать R: Индекс риска |
Оценка степени риска |
Структурный элемент ГОСТ Р 60.2.2.1-2016 |
|
1 Электри- ческая |
Короткое замыкание батареи |
Возгорание, испускание опасных газов или веществ |
S2: Выход из строя батареи не может привести к серьезным травмам. Однако, если короткое замыкание вызывает возгорание, то травмы могут быть серьезными F2: Робот может заряжаться при работе вблизи людей O1: Литий ионная батарея имеет встроенную схему безопасности и защищена огнестойким корпусом. (Батарея соответствует ГОСТ Р МЭК 62133-1) A2: Выход из строя батареи не может быть выявлен заранее R: 4 |
Приемлемая, современное состояние технологий не дает более хороших решений |
5.2 |
|
2 Меха- ническая |
Неудача при обнаружении связанных с безопас- ностью объектов в рабочем простра- нстве |
Удар и раздавли- вание человека, тупые травмы |
S1: Робот легкий и движется на малой скорости, вред не вызывает серьезных травм F2: Робот постоянно работает вблизи людей и взаимодействует с ними O3: Функция очувствления не имеет оценки функциональной безопасности. Вероятность может быть средней или даже высокой A2: Престарелые люди не могут быстро избежать R: 2 |
Приемлемая, но отмечена для последу- ющего снижения риска, т.к. вероятность нанесения вреда высокая, но существуют решения данной проблемы |
5.10.8 |
|
3 Шум |
Опасный уровень акусти- ческого шума от редукторов и двигателей, выявленный при излучении высоко- частотного звука в процессе работы |
Стресс, дискомфорт, боль |
S1: Если престарелый человек носит слуховой аппарат, то шум вызывает стресс F2: Робот постоянно издает шум во время работы O3: Данное опасное событие происходит постоянно во время работы робота A1: Может быть устранено R: 2 |
Приемлемая, но отмечена для последую- щего снижения риска |
5.7.1 |
|
4 Меха- ническая |
Неустой- чивое переме- щение во время основного типа переме- щения, вызываю- щее падение робота |
Столкно- вение, удар, раздавли- вающие травмы |
S1: Робот легкий, поэтому не приводит к серьезным травмам F2: Пользователь постоянно находится в опасности при игре с роботом O2: Робот в принципе устойчив, но может оказаться неустойчивым при выполнении некоторых экстремальных движений A2: Престарелые люди и дети не способны избежать опасности, не обладая достаточной ловкостью R: 1 |
Приемлемая, но отмечена для последую- щего снижения риска, т.к. вероятность причинения вреда высока, а в настоящее время существуют решения данной проблемы (например, снижение максимальной скорости) |
5.10.3 |
|
5 Меха- ническая |
Ошибки навигации, вызыва- ющие остановку робота где-то в здании, возможно, блокируя проход (дверь, лифт и т.д.) |
Человек не может покинуть комнату. В аварийных ситуациях ухаживающий персонал не может подойти к человеку |
S2: В критических ситуациях блокировка прохода может привести к серьезным травмам F1: Блокировка критического прохода в критической ситуации случается редко O2: Ошибки навигации могут случаться время от времени A1: Робот может быть перемещен вручную R: 2 |
Приемлемая, т.к. робот может быть поднят и перемещен вручную |
5.16 |
|
6 Меха- ническая |
Опасный физический контакт с рукой робота при взаимодействии человека с роботом |
Удар, столкновение, тупые травмы |
S2: Движение рук робота может вызвать травму головы F2: Игры, связанные с жестикуляцией, являются обычным использованием робота O3: Столкновение может произойти, т.к. нет защитных мер A1: Человек может быть удивлен движение робота и не иметь времени, чтобы уклониться R: 6 |
Неприем- лемая, т.к. серьезность и вероятность причинения вреда высоки |
5.10.9 |
|
7 Меха- ническая |
Падение со стола или с приподнятой платформы |
Раздавли- вающие травмы |
S2: Падение на человека может вызвать серьезную травму F2: Робот постоянно работает вблизи людей O3: Может произойти, т.к. у робота нет датчиков для определения ступеней A2: Престарелый человек едва ли может уклониться R: 4 |
Неприем- лемая, в руководство пользова- теля должны быть внесены инструкции не помещать робота на приподнятые платформы или столы |
5.10.3 |
7.3.2.3 Меры по снижению риска
При общей оценке риска идентифицируют опасности, приводящие к неприемлемому риску или подлежащие снижению. В таблице 7 представлены три выбранные опасности, по которым применяют меры по их снижению.
Таблица 7 — Меры по снижению риска для трех выбранных опасностей
|
Опасность и опасное событие |
Потенциальное последствие |
Меры конструирования со встроенной безопасностью |
Ограждение или дополнительные защитные меры |
Информация по использованию |
|
2 Неудача при обнаружении связанных с безопасностью объектов в рабочем пространстве |
Удар и раздавливание человека, тупые травмы |
Максимальная скорость движения робота снижена до 0,6 м/с с помощью выбора соответствующих приводов (см. ГОСТ Р 60.2.2.1-2016, 5.10.8.2) |
Робот оснащен защитным устройством (например, лазерным сканером безопасности) для обнаружения препятствий (см. ГОСТ Р 60.2.2.1-2016, 5.10.8.3) |
Описание примененных защитных мер, рабочих ограничений и опасностей, связанных со столкновением |
|
3 Опасный уровень акустического шума |
Стресс, дискомфорт, боль |
Шум снижен до уровня менее 60 дБ с помощью использования малошумящих двигателей и редукторов и, возможно, изоляции |
Шумоизолирующий корпус |
Примечание для обслуживающего персонала, что люди со слуховыми аппаратами могут испытывать стресс |
|
6 Опасный физический контакт с рукой робота при взаимодействии человека с роботом |
Удар, столкновение, тупые травмы |
В локте робота применяют разъединительную муфту для смягчения удара при резком движении |
Ограничение рабочего пространства робота, чтобы предотвратить движение рук до уровня головы стоящего человека (см. 6.3) (При этом не снижается риск столкновения, например, с сидящими людьми или с маленькими детьми) |
Информация для пользователя не находиться вблизи движущихся частей робота и предоставление руководства по минимизации контакта с областью головы |
7.3.2.4 Окончательная оценка риска и остаточный риск
После применения всех мер по снижению риска следует произвести окончательную оценку риска, чтобы определить было ли снижение риска успешным и установить остаточный риск. В таблице 8 показаны только опасности, выбранные в 7.3.2.3.
Таблица 8 — Окончательная оценка риска
|
Тип опасности |
Опасность и опасное событие |
Потенциальное последствие |
Предварительная оценка риска: S: Серьезность вреда F: Частота воздействия O: Вероятность возникновения A: Возможность избежать R: Индекс риска |
Оценка степени риска |
Структурный элемент ГОСТ Р 60.2.2.1-2016 |
|
2 Меха- ническая |
Неудача при обнару- жении связанных с безопас- ностью объектов в рабочем простра- нстве |
Удар и раздавли- вание человека, тупые травмы |
S1: Робот легкий и движется на малой скорости, вред не вызывает серьезных травм F2: Робот предназначен для работы вблизи людей O1: Пониженная скорость движения и использование защитного устройства снизили вероятность риска почти до нуля A2: Престарелые люди не могут избежать без достаточной ловкости R: 1 |
Прием- лемая, т.к. применены современ- ные меры по ограни- чению вероят- ности причи- нения вреда |
5.10.8 |
|
3 Меха- ническая/ эргоно- мическая |
Опасный уровень акустиче- ского шума |
Стресс, дискомфорт, боль |
S1: Если престарелый человек носит слуховой аппарат, то шум вызывает стресс F2: Робот постоянно издает шум во время работы O1: Шум эффективно снижен с помощью дополнительных мер A1: Может быть устранено R: 1 |
Прием- лемая, т.к. снижена вероят- ность причи- нения вреда |
5.7.1 |
|
6 Меха- ническая |
Опасный физический контакт с рукой робота при взаимо- действии человека с роботом |
Удар, столкновение, тупые травмы |
S1: Муфта и ограничение рабочего пространства снижают возможный вред F2: Игры, связанные с жестикуляцией, являются обычным использованием робота O3: Столкновение может произойти, т.к. нет защитных мер A2: Человек может быть удивлен движением робота и не иметь времени, чтобы уклониться R: 2 |
Приемле- мая, т.к. ограниче- ние рабочего пространства и муфта ограничи- вают серьезность вреда |
5.10.9 |
7.3.3 Система управления, связанная с безопасностью
В процессе снижения риска применяют меры безопасности, являющиеся частью системы управления. Лазерный сканер безопасности является защитной мерой для предотвращения опасного столкновения. В таблице 9 требуемые характеристики системы управления подтверждены в соответствии с графиком риска из ГОСТ ISO 13849-1.
Таблица 9 — Функция безопасности и заданный УЭЗ
|
Функция безопасности |
Рекомендованный УЭЗ в соответствии с ГОСТ Р 60.2.2.1-2016, таблица 1 |
УЭЗ в соответствии с ГОСТ ISO 13849-1: S: Серьезность травмы F: Частота и/или длительность опасности P: Вероятность избегания опасности или ограничения вреда |
Структурный элемент ГОСТ Р 60.2.2.1-2016 |
|
I Предотвращение опасного столкновения (мобильная платформа) |
c |
S1: Столкновения на небольшой скорости не могут вызвать серьезную травму F2: Пользователь подвержен опасности в течение всего времени работы P2: Престарелый человек или ребенок не могут избежать опасности, т.к. не обладают необходимой ловкостью УЭЗт: c |
6.5.2.1 |
|
II Ограничения рабочего пространства робота (предотвращение высокого поднятия рук) |
c |
S1: Столкновения с руками не могут вызвать серьезных травм после применения механической муфты F2: Игры, связанные с жестикуляцией, являются обычным применением робота P2: Человек может быть удивлен движением рук робота и не иметь времени, чтобы избежать опасности УЭЗт: c |
6.3 |
|
III Аварийная остановка |
d |
S2: Некоторые опасности (например падение) могут вызвать серьезную травму F1: Аварийную остановку используют не часто P2: Если авария уже случилась, то ее едва ли можно избежать УЭЗт: d |
6.2.2.2 |
|
IV Защитная остановка |
b |
S1: Все защищенные опасности не являются серьезными F2: Робот часто напрямую контактирует с пользователем и не имеет датчиков для предотвращения столкновений с руками P2: Престарелые люди едва ли могут избежать УЭЗт: c |
6.2.2.3 |
7.4 Робот для оказания физической помощи закрепляемого типа
7.4.1 Обзор
В данном примере представлен робот для оказания физической помощи закрепляемого типа, помогающий верхним и нижним конечностям пользователя при ходьбе по ровному полу, при подъеме и спуске с табурета, снятию объектов с высоких полок и подъему объектов.
Архитектура системы
Робот представляет собой экзоскелет, питающийся от литий-ионной батареи, с восемью двигателями для плечевых, локтевых, тазобедренных и коленных суставов для оказания помощи верхним и нижним конечностям пользователя. У робота есть оснастка, покрывающая грудь, плечи и талию пользователя, а также манжеты вокруг плеч, предплечий, бедер и голеней.
Технические характеристики
Номинальный момент двигателей в плечах составляет 10 Нм, а в бедерных и коленных суставах — 20 Нм (номинальные моменты существенно ниже, чем способности намеченных групп пользователей). Размер экзоскелета является настраиваемым под конкретного пользователя. Режимы помощи для выполнения разных двигательных задач выбирают вручную с помощью переключателя.
Рабочая среда
Робот спроектирован для работы внутри помещений с температурой окружающего воздуха от 0°С до 30°С на ровной поверхности и табурете.
Типичные задания
Предполагается, что робот будет выполнять следующие двигательные задания с помощью разных режимов помощи:
— помощь пользователю при ходьбе по ровному полу;
— помощь пользователю взобраться на табурет;
— помощь пользователю дотянуться до объектов и достать их с полок;
— помощь пользователю спуститься с табурета.
Пользователь вручную переключает режимы работы.
Степень автономности
В данном рабочем примере робот работает в полуавтономном режиме (согласно ГОСТ Р 60.2.2.1-2016, 6.10). Степень автономности для всех выполняемых заданий низка.
Определение подтипа робота
Робот классифицирован как тип 2.1 (маломощный робот для оказания физической помощи), т.к. даже максимальное развиваемое усилие не может ни травмировать пользователя, ни нарушить балансировочную способность пользователя. Практические испытания были проведены в процессе проектирования для проверки того, что балансировочная способность пользователя не будет нарушена, если экзоскелет будет выключен во время подъема на табурет. Масса робота достаточно мала, позволяя пользователю поднимать робота и перемещаться с ним. Скорости суставов робота достаточно медленные для формирования реакции со стороны пользователя.
Примечание — Робот для оказания физической помощи считается маломощным, если пользователь может пересилить робота. См. ГОСТ Р 60.2.2.1-2016, 6.1.2.
7.4.2 Оценка риска
7.4.2.1 Определение ограничений робота по персональному уходу
В данном примере сделаны следующие предположения об ограничениях робота:
— пользователь формирует свои двигательные намерения, а робот обеспечивает помощь в их реализации;
— пользователями робота являются люди, не имеющие физических увечий, которые получили инструкции по использованию и функциям безопасности, указанными изготовителем;
— пользователю должно быть не менее 14 лет;
— вес пользователя не должен превышать 100 кг.
Предсказуемое неправильное использование
Можно ожидать следующие неправильные использования робота:
— использование робота вне помещений;
— прикосновение к электрически неизолированным частям мокрой рукой;
— использование робота при температуре окружающего воздуха выше 30°С;
— использование робота неподходящего размера;
— использование незакрепленного или неправильно закрепленного робота;
— использование робота в неожиданном месте, например, в узком пространстве или в среде, где ожидается наличие пыли или конденсата.
Примерами двух мер по предотвращению неправильного использования, которые могут быть предусмотрены изготовителем, являются следующие:
— продажа робота допускается только в магазинах с обученным персоналом, который может помочь определить правильный размер экзоскелета и может показать его правильное закрепление и открепление;
— продажа робота должна осуществляться только вместе с обучением, охватывающим все инструкции по обращению с роботом.
7.4.2.2 Идентификация исходной опасности и предварительная оценка риска
В таблице 10 представлены идентифицированные опасности, создаваемые роботом для оказания физической помощи закрепляемого типа. Данный перечень основан на ГОСТ Р 60.2.2.1-2016, приложение А, используемого в качестве контрольной таблицы, и обсуждения каждой опасности из данного приложения на предмет ее присутствия. Для краткости список ограничен десятью элементами, хотя возможно существуют и другие опасности. Кроме того, в таблице 10 показана предварительная оценка риска, происходящего от данных опасностей на основе графика риска на рисунке 3.
Таблица 10 — Оценка степени риска перед применением мер по снижению риска
|
Тип опасности |
Опасность и опасное событие |
Потенциальное последствие |
Предварительная оценка риска: S: Серьезность вреда F: Частота воздействия O: Вероятность возникновения A: Возможность избежать R: Индекс риска |
Оценка степени риска |
Структурный элемент ГОСТ Р 60.2.2.1-2016 |
|
1 Меха- ническая |
Случайный запуск |
Травма ноги или руки |
S1: Пользователь может пересилить робота, поэтому ожидается только небольшая травма F2: Пользователь подвержен данной опасности всегда, когда он носит на себе робота O2: Опасное событие может происходить со средней частотой A1: Пользователь может пересилить робота в любое время R: 1 |
Приемлемая, т.к. серьезность низка, и пользователь может пересилить данную опасность |
5.4 |
|
2 Меха- ническая |
Потеря устойчи- вости и падение с табурета из-за неожидан- ных усилий привода |
Травма головы |
S2: Падение с табурета может привести к серьезной травме головы F2: Пользователь постоянно носит экзоскелет O1: Для данного маломощного экзоскелета неожиданные усилия привода не влияют на балансировочную способность A2: Пользователь в любое время может пересилить робота R: 3 |
Приемлемая, т.к. вероятность возникновения опасности низка, и пользователь может обнаружить опасность и отреагировать, чтобы противостоять ей |
5.10.2 |
|
3 Меха- ническая |
Потеря устойчи- вости и падение из-за неожидан- ных усилий привода |
Травма головы |
S2: Падение из вертикального положения может привести к тяжелой травме головы F2: Пользователь носит экзоскелет постоянно O1: Для данного маломощного экзоскелета неожиданные усилия привода не влияют на балансировочную способность A2: Пользователь в любое время может пересилить робота R: 3 |
Приемлемая, т.к. вероятность возникновения опасности низка, и пользователь может обнаружить опасность и отреагировать, чтобы противостоять ей |
5.10.2 |
|
4 Меха- ническая |
Приложение помогаю- щего момента в неправи- льном направ- лении без влияния на устойчи- вость пользо- вателя |
Травма ноги или руки |
S1: Пользователь пересиливает, поэтому возможна только небольшая травма F2: Пользователь подвержен данной опасности всегда, когда он носит робота O2: Данное опасное событие может происходить со средней частотой A1: Пользователь может пересилить робота в любое время R: 1 |
Приемлемая, т.к. серьезность низка, и пользователь может обнаружить опасность и отреагировать, чтобы противостоять ей |
5.10.2 |
|
5 Меха- ническая |
Потеря устойчи- вости из-за потери помогаю- щего момента |
Травма ноги, руки или спины |
S1: Трение в двигателях смягчает неожиданную потерю помогающего усилия и замедляет возможную потерю устойчивости F2: Пользователь подвержен данной опасности всегда, когда он носит робота O2: Данное опасное событие может происходить со средней частотой A1: Трение в двигателях снижает скорость изменения помогающего усилия, и пользователь может отреагировать, чтобы избежать вреда R: 1 |
Приемлемая, т.к. серьезность низка, и пользователь может обнаружить опасность и отреагировать, чтобы противостоять ей |
5.3.3 |
|
6 Электри- ческая |
Опасность возгорания батареи |
Ожог |
S2: Возможен тяжелый ожог F2: Пользователь подвержен данной опасности всегда, когда он носит робота O2: Вторичная батарея редко подвержена опасности возгорания A2: Робот не может быть снят достаточно быстро, чтобы спастись от огня R: 5 |
Неприем- лемая, т.к. серьезность и вероятность возникновения вреда высоки |
5.3 |
|
7 Терми- ческая |
Наладчик дотраги- вается до горячей части внутри робота во время техниче- ского обслужи- вания |
Ожог |
S1: Горячие части робота могут вызвать только небольшой ожог F2: Наладчик подвержен данной опасности, когда недавно использованный экзоскелет открыт O3: При нормальной эксплуатации некоторые части внутри экзоскелета могут быть горячими A1: Обученный наладчик будет избегать прикасаться к горячим частям R: 2 |
Приемлемая, т.к. серьезность низка, и наладчик может избежать данной опасности |
5.7.4 |
|
8 Электри- ческая |
Касание электри- ческих разъемов мокрыми руками |
Электри- ческий шок |
S1: Контакт с электрически неизолированными частями вызывает только небольшую травму благодаря низкому напряжения батарей F2: Пользователь подвержен данной опасности всегда, когда он носит робота O2: Доступ к токоведущим частям при касании разъема может произойти в редких случаях A2: Электрический шок возникает быстро и его нельзя избежать R: 1 |
Приемлемая в принципе, но отмечена для последующего снижения риска, т.к. существуют решения данной проблемы |
5.2 |
|
9 Эргоно- мическая |
Дискомфорт |
Стресс |
S1: Пользователь может почувствовать дискомфорт будучи ограниченным роботом F2: Пользователь подвержен данной опасности всегда, когда он носит робота O1: При испытаниях обычно был отмечен низкий уровень дискомфорта A1: Пользователь может прекратить использование робота, если испытывает эмоциональный стресс R: 1 |
Приемлемая |
5.9 |
|
10 Мате- риал/ вещество |
Выделение пыли |
Пневмокониоз |
S1: Выделение небольшого количества пыли из тормозной системы может в редких случаях привести к небольшим респираторным проблемам F2: Пользователь может вдыхать всегда, когда он носит робота O2: Опасное количество пыли может накопиться, если робот используется длительное время в помещениях без вентиляции A2: Вдыхания пыли нельзя избежать R: 1 |
Приемлемая в принципе, т.к. серьезность низка, но отмечена для последующего снижения риска, т.к. существуют решения данной проблемы |
5.7.3 |
7.4.2.3 Меры по снижению риска
При общей оценке риска идентифицируют опасности, приводящие к недопустимому риску, который должен быть снижен. В таблице 11 показаны три выбранные опасности, к которым применяют меры по снижения риска.
Таблица 11 — Меры по снижению риска для трех выбранных опасностей
|
Опасность и опасное событие |
Потенциальное последствие |
Меры конструирования со встроенной безопасностью |
Защитные меры или дополнительные защитные меры |
Информация по использованию |
|
6 Опасность возгорания батарей |
Ожог |
Современное состояние технологии создания батарей с конструкцией, снижающей опасность возгорания (например, см. ГОСТ Р МЭК 62133-1 и ГОСТ IEC 60335-2-29) |
— |
В руководство пользователя будут включены инструкции по обращению с батареями и зарядке батарей |
|
8 Касание электрических разъемов мокрыми руками |
Электрический шок |
Конструкция разъемов изменена так, что касание пальцем токоведущих частей практически невозможно |
— |
В руководство пользователя добавлена инструкция не эксплуатировать робота с мокрыми руками |
|
10 Выделение пыли |
Пневмокониоз |
Материалы и компоненты экзоскелета выбирают так, чтобы выделение пыли (например из тормозов) было по возможности минимальным |
— |
— |
7.4.2.4 Окончательная оценка риска и остаточный риск
После применения всех мер по снижению риска следует произвести окончательную оценку риска, чтобы определить было ли снижение риска успешным и установить остаточный риск. В таблице 12 показаны только опасности, выбранные в 7.4.2.3.
Таблица 12 — Окончательная оценка риска
|
Тип опасности |
Опасность и опасное событие |
Потенциальное последствие |
Предварительная оценка риска: S: Серьезность вреда F: Частота воздействия O: Вероятность возникновения A: Возможность избежать R: Индекс риска |
Оценка степени риска |
Структурный элемент ГОСТ Р 60.2.2.1-2016 |
|
6 Электри- ческая |
Опасность возгорания батарей |
Ожог |
S2: Возможен тяжелый ожог F2: Пользователь подвержен данной опасности всегда, когда он носит робота O1: Благодаря выбору надежных батарей и надлежащего изменения инструкций, вероятность ожога очень мала A2: Робот не может быть снят достаточно быстро, чтобы спастись от огня R: 4 |
Приемлемая, т.к. современные технологии не предоставляют более хороших решений |
5.3 |
|
8 Электри- ческая |
Касание электрических разъемов мокрыми руками |
Электрический шок |
S1: Контакт с электрически неизолированными частями вызывает только небольшую травму благодаря низкому напряжения батарей F2: Пользователь подвержен данной опасности всегда, когда он носит робота O1: Токоведущие части в конструкции разъемов скрыты так, что вероятность касания очень мала A2: Электрический шок возникает быстро и его нельзя избежать R: 1 |
Приемлемая, т.к. серьезность и вероятность вреда существенно малы |
5.2 |
|
10 Мате- риал/ вещество |
Выделение пыли |
Пневмокониоз |
S1: Выделение небольшого количества пыли из тормозной системы может в редких случаях привести к небольшим респираторным проблемам F2: Пользователь может вдыхать всегда, когда он носит робота O2: Опасное количество пыли может накопиться, если робот используется длительное время в помещениях без вентиляции A2: Вдыхания пыли нельзя избежать R: 1 |
Приемлемая, т.к. вероятность вреда очень низка |
5.7.3 |
7.4.3 Система управления, связанная с безопасностью
В процессе снижения риска не применены никакие защитные меры, использующие связанную с безопасностью систему управления. Однако робот оснащен функцией аварийной остановки, позволяющей останавливать робота, например в случае, когда приводы создают неправильные моменты. В таблице 13 показан УЭЗ, необходимый для функции безопасности.
Таблица 13 — Функция безопасности и заданный УЭЗ
|
Функция безопасности |
Рекомендованный УЭЗ в соответствии с ГОСТ Р 60.2.2.1-2016, таблица 1 |
УЭЗ в соответствии с ГОСТ ISO 13849-1: S: Серьезность травмы F: Частота и/или длительность опасности P: Вероятность избегания опасности или ограничения вреда |
Структурный элемент ГОСТ Р 60.2.2.1-2016 |
|
I Аварийная остановка |
c |
S1: Пользователь может пересилить робота и ожидается только небольшая травма F1: Ситуации, в которых требуется аварийная остановка, встречаются редко P2: Если авария уже случилась, то уклонение вряд ли возможно УЭЗт: b |
6.2.2.2 |
7.5 Робот для перевозки человека
7.5.1 Обзор
В данном примере представлен самобалансирующийся робот для перевозки человека, способный перевозить одного пассажира из одного места в другое.
Архитектура системы
Робот состоит из рулевой колонки, двух платформ (по одной для каждой ноги) и двух колес, размещенных под платформами в поперечном направлении. Робот не имеет сиденья, и его пассажир может управлять роботом, стоя на платформах.
Технические характеристики
Робот имеет регулируемую высоту от 1,2 до 1,4 м и вес 15 кг. Максимальная скорость перемещения робота 6 км/час. Колеса робота имеют надувные шины.
Рабочая среда
Робот спроектирован для работы внутри помещения на ровном полу с углом наклона, не превышающем 5°.
Типичные задания
Намеченным для робота заданием является перевозка человека из одного места в другое внутри помещения по ровной поверхности без каких-либо разрывов.
Роботом управляет пользователь, наклоняя рулевую колонку в требуемом направлении движения.
Степень автономности
В данном рабочем примере робот работает в ручном режиме управления. Однако робот постоянно автономно выполняет задачу управления устойчивостью. Поэтому в комбинации можно предположить, что робот работает в полуавтономном режиме.
Определение подтипа робота
Робот классифицирован как тип 3.1, т.к. он предполагает наличие одного стоящего пассажира, используется на ровной поверхности внутри помещения, максимальная скорость робота соответствует скорости пешехода, робот имеет легкий вес и работает в полуавтономном режиме.
7.5.2 Оценка риска
7.5.2.1 Определение ограничений робота по персональному уходу
В данном примере сделаны следующие предположения об ограничениях робота:
— использование на ровных поверхностях внутри помещений;
— все маневры совершает пользователь, находящийся на борту робота;
— робота для перевозки человека использует физически дееспособный пользователь, прошедший инструктаж по использованию робота и функциям безопасности, определенными изготовителем;
— пассажиру должно быть не менее 14 лет;
— вес пассажира не должен превышать 100 кг;
— максимальная скорость передвижения равна 6 км/час.
Предсказуемое неправильное использование
Можно ожидать следующие неправильные использования робота:
— перемещение вне помещений;
— перемещение по скользкому полу;
— перемещение по неровной поверхности;
— перемещение с тяжелым грузом;
— перемещение в загроможденной среде (заполненной людьми и/или предметами);
— касание зарядного разъема мокрыми руками;
— неосторожное вождение.
7.5.2.2 Идентификация исходной опасности и предварительная оценка риска
В таблице 14 представлены идентифицированные опасности робота для перевозки человека. Данный перечень основан на ГОСТ Р 60.2.2.1-2016, приложение А, используемого в качестве контрольной таблицы, и обсуждения каждой опасности из данного приложения на предмет ее присутствия. Для краткости список ограничен десятью элементами, хотя возможно существуют и другие опасности. Кроме того, в таблице 14 показана предварительная оценка риска, происходящего от данных опасностей на основе графика риска на рисунке 3.
Таблица 14 — Оценка степени риска перед применением мер по снижению риска
|
Тип опасности |
Опасность и опасное событие |
Потенциальное последствие |
Предварительная оценка риска: S: Серьезность вреда F: Частота воздействия O: Вероятность возникновения A: Возможность избежать R: Индекс риска |
Оценка степени риска |
Структурный элемент ГОСТ Р 60.2.2.1-2016 |
|
1 Меха- ническая |
Столкновение с препятствиями, связанными с безопасностью |
Травма груди или ноги |
S2: Столкновение с препятствиями на скорости 6 км/час и его последствия, например потеря равновесия пассажиром, может привести к серьезным травмам F2: Пользователь подвержен данной опасности всегда, когда он использует робота O3: Опасное событие может происходить при эксплуатации робота A1: Скорость перемещения робота соответствует скорости пешехода и столкновения можно избежать R: 5 |
Неприемлемая, т.к. серьезность и вероятность высоки |
5.10.8 |
|
2 Меха- ническая |
Опрокиды- вание или падение из-за перемещения через выпуклости или выбоины |
Травма головы |
S2: Падение из вертикального положения может привести к серьезной травме головы F2: Пользователь подвержен данной опасности всегда, когда он использует робота O2: Опасное событие может случиться неожиданно в процессе эксплуатации робота A1: Опасных неровностей на поверхности можно избежать R: 4 |
Неприемлемая, т.к. серьезность и вероятность высоки |
5.10.3 |
|
3 Меха- ническая |
Падение, когда робот скользит по полу |
Травма головы |
S2: Скольжение может привести к серьезной травме головы F2: Пользователь подвержен данной опасности всегда, когда он использует робота O2: Опасное событие может случиться неожиданно в процессе эксплуатации робота A2: Скольжения избежать невозможно R: 5 |
Неприемлемая, т.к. серьезность и вероятность высоки |
5.10.3 |
|
4 Меха- ническая |
Случайные люди могут оказаться зажатыми между роботом для перевозки человека и полом или стенами |
Травма груди |
S2: Столкновение на скорости 6 км/час может привести к серьезным травмам F2: Случайные люди подвержены данной опасности часто, когда робот работает O2: Опасное событие может случиться неожиданно в процессе эксплуатации робота A1: Скорость перемещения робота соответствует скорости пешехода и столкновения можно избежать R: 4 |
Неприемлемая, т.к. серьезность и вероятность причинения вреда высоки |
5.10.8 |
|
5 Меха- ническая |
Столкновение из-за сбоя системы управления |
Травма головы |
S2: Столкновение может привести к серьезной травме головы F2: Пользователь подвержен данной опасности всегда, когда робот работает O2: Опасное событие может произойти лишь изредка с роботом посредственного качества A1: Скорость перемещения робота соответствует скорости пешехода и столкновения можно избежать R: 4 |
Неприемлемая, т.к. серьезность высока, а вероятность причинения вреда средняя |
5.10.8 |
|
6 Меха- ническая |
Падение из-за соскальзы- вания с платформ |
Травма головы |
S2: Падение из вертикального положения может привести к серьезной травме головы F2: Пользователь подвержен данной опасности всегда, когда он использует робота O2: Опасное событие происходит время от времени A1: Скорость перемещения соответствует скорости пешехода, и пользователь может в большинстве случаев сойти с робота R: 4 |
Неприемлемая, т.к. серьезность и вероятность причинения вреда высоки |
5.6 |
|
7 Меха- ническая |
Переезд через руку или ногу случайного человека |
Травма ноги или ступни |
S1: Переезд надувной шиной может привести только к небольшой травме F2: Случайные люди подвержены данной опасности, когда робот работает O2: Опасное событие может произойти в процессе эксплуатации робота A2: Скорость перемещения соответствует скорости пешехода, и пользователь может избежать столкновения со случайными людьми R: 2 |
Приемлемая, т.к. серьезность и вероятность причинения вреда средние |
5.10.8 |
|
8 Эргоно- мическая |
Эмоцио- нальный стресс из-за раздража- ющего интерфейса или органов управления |
Эмоцио- нальный диском- форт |
S1: Возможен эмоциональный дискомфорт F2: Пользователь подвержен данной опасности всегда, когда робот работает O2: Испытания показывают, что пассажиры могут испытывать эмоциональный стресс в некоторых случаях A1: Пользователь может прекратить использование робота, если испытывает эмоциональный стресс R: 1 |
Приемлемая, т.к. серьезность низка |
5.9 |
|
9 Меха- ническая |
Случайный запуск |
Травма ноги |
S2: При наихудшем сценарии робот сталкивается с ногой на скорости 6 км/час, что может привести к серьезной травме F2: Пользователь подвержен данной опасности всегда, когда он стоит рядом с роботом O2: Опасное событие может происходить лишь изредка с роботом низкого качества A2: Столкновения нельзя избежать, если изначально робот расположен очень близко к пользователю R: 5 |
Неприемлемая, т.к. серьезность высока, а вероятность причинения вреда средняя |
5.4 |
|
10 Электри- ческая |
Касание электри- ческих разъемов мокрыми руками |
Электрический шок |
S1: Контакт с электрически неизолированными частями вызывает только небольшую травму благодаря низкому напряжению батарей F2: Пользователь подвержен данной опасности всегда, когда робот работает O2: Доступ к токоведущим частям при касании разъема может произойти в редких случаях A2: Электрический шок возникает быстро и его нельзя избежать R: 1 |
Приемлемая в принципе, но отмечена для последующего снижения риска, т.к. существуют разъемы с минимальной доступностью токоведущих частей |
5.3.1 |
7.5.2.3 Меры по снижению риска
При общей оценке риска идентифицируют опасности, приводящие к недопустимому риску, который должен быть снижен. В таблице 15 показаны три выбранные опасности, к которым применяют меры для снижения риска.
Таблица 15 — Меры по снижению риска для трех выбранных опасностей
|
Опасность и опасное событие |
Потен- циальное последствие |
Меры конструирования со встроенной безопасностью |
Меры предосторожности или дополнительные защитные меры |
Информация по использованию |
|
1 Столкновение с препятствиями, связанными с безопасностью |
Травма груди или ноги |
Использование маломощных двигателей, ограничивающих скорость до 4 км/ч (ГОСТ Р 60.2.2.1-2016, 5.10.8.2) |
Улучшить управление устойчивостью для облегчения быстрого маневрирования (ГОСТ Р 60.2.2.1-2016, 6.6) |
Обучение действиям в аварийных ситуациях |
|
2 Опрокидывание или падение из-за перемещения через выпуклости или выбоины |
Травма головы |
В конструкции робота использовать колеса большего диаметра |
Улучшить управление устойчивостью (ГОСТ Р 60.2.2.1-2016, 6.6) |
Инструкции по ношению шлема, налокотников, наколенников и защиты запястья |
|
3 Падение, когда робот скользит по полу |
Травма головы |
Использованием шин с большим коэффициентом трения ГОСТ Р 60.2.2.1-2016, 5.10.3.2) |
Ограничение ускорения (ГОСТ Р 60.2.2.1-2016, 5.10.3.3) Связанное с безопасностью управление скоростью (ГОСТ Р 60.2.2.1-2016, 6.4) |
Предупреждающий знак не делать резкого ускорения или торможения (ГОСТ Р 60.2.2.1-2016, 5.10.3.4) Инструкции по ношению шлема, налокотников, наколенников и защиты запястья |
7.5.2.4 Окончательная оценка риска и остаточный риск
После применения всех мер по снижению риска следует произвести окончательную оценку риска, чтобы определить было ли снижение риска успешным и установить остаточный риск. В таблице 16 показаны только опасности, выбранные в 7.5.2.3.
Таблица 16 — Окончательная оценка риска
|
Тип опасности |
Опасность и опасное событие |
Потенциальное последствие |
Предварительная оценка риска: S: Серьезность вреда F: Частота воздействия O: Вероятность возникновения A: Возможность избежать R: Индекс риска |
Оценка степени риска |
Структурный элемент ГОСТ Р 60.2.2.1-2016 |
|
1 Меха- ническая |
Столкновение с препятствиями, связанными с безопасностью |
Травма груди или ноги |
S1: Столкновение с препятствиями на скорости 4 км/час может привести только к небольшим травмам F2: Пользователь подвержен данной опасности всегда, когда он использует робота O2: Возникновение опасного события сведено к минимуму обучением A1: Скорость перемещения робота соответствует скорости пешехода и столкновения можно избежать R: 1 |
Приемлемая, т.к. серьезность низка, а вероятность причинения вреда на среднем уровне |
5.10.8 |
|
2 Меха- ническая |
Опрокиды- вание или падение из-за перемещения через выпуклости или выбоины |
Травма головы |
S1: При падении из вертикального положения использование защитных средств снижает риск получения серьезной травмы F2: Пользователь подвержен данной опасности всегда, когда он использует робота O2: При улучшенной конструкции опасное событие может произойти лишь изредка A1: Опасных неровностей на поверхности можно избежать R: 1 |
Приемлемая, т.к. серьезность низка |
5.10.3 |
|
3 Меха- ническая |
Падение, когда робот скользит по полу |
Травма головы |
S1: При скольжении использование защитных средств снижает риск получения серьезной травмы F2: Пользователь подвержен данной опасности всегда, когда он использует робота O2: Использование шин с большим коэффициентом трения значительно снижает вероятность появления опасного события A2: Скольжения избежать невозможно R: 1 |
Приемлемая, т.к. серьезность низка |
5.10.3 |
7.5.3 Система управления, связанная с безопасностью
В процессе снижения риска применены две защитные меры, использующие связанную с безопасностью систему управления. В таблице 17 показан УЭЗ, необходимый для функций безопасности. УЭЗ для двух функций безопасности, рекомендуемый ГОСТ Р 60.2.2.1-2016, 6.1.3, для типа 3.1 составляет c и b, соответственно. В таблице 17 УЭЗт подтвержден в соответствии с графиком риска из ГОСТ ISO 13849-1.
Таблица 17 — Функция безопасности и заданный УЭЗ
|
Функция безопасности |
Рекомендованный УЭЗ в соответствии с ГОСТ Р 60.2.2.1-2016, таблица 1 |
УЭЗ в соответствии с ГОСТ ISO 13849-1: S: Серьезность травмы F: Частота и/или длительность опасности P: Вероятность избегания опасности или ограничения вреда |
Структурный элемент ГОСТ Р 60.2.2.1-2016 |
|
I Связанное с безопасностью управление скоростью (с ограничением ускорения) для предотвращения скольжения |
c |
S2: Столкновение с препятствием на скорости 6 км/час может привести к серьезной травме F1: Скользкий пол встречается редко P1: Скольжение снижают с помощью шин с большим коэффициентом трения УЭЗт: c |
6.4 |
|
II Управление устойчивостью |
c |
S2: Падение из вертикального положения может привести к серьезной травме головы F1: Хотя управление устойчивостью постоянно активно, существует вероятность, что падение не всегда приводит к серьезным последствиям P1: При потере управления устойчивостью нет шанса избежать падения УЭЗт: d |
6.6 |
Как показано в ГОСТ Р 60.2.2.1-2016, 6.1.4, УЭЗ, полученный на основе оценки риска имеет преимущество по сравнению с УЭЗ, рекомендованным в ГОСТ Р 60.2.2.1-2016, таблица 1. В данном примере показан случай, когда оценка риска дает другой УЭЗ по сравнению с рекомендованным в ГОСТ Р 60.2.2.1-2016, таблица 1.
7.6 Робот для оказания физической помощи незакрепляемого типа
7.6.1 Обзор
В данном примере представлен активный шагающий механизм, спроектированный для оказания помощи престарелым людям в домашних условиях, обеспечивающий поддержку при ходьбе, приседании и вставании, что необходимо при ежедневном использовании, например, при принятии ванны, одевании, приеме пищи и питья, а также при пользовании туалетом.
Архитектура системы
Робот состоит из рамы с четырьмя мотор-колесами. На раме установлены интегрированные опора для спины и стол-поднос, интегрированный складной стул, датчик обнаружения объектов, планшетный компьютер и батарейный отсек. Пользователь держит раму за регулируемую по высоте систему тяг с рукоятками. Робот заряжается от док-станции.
Технические характеристики
Робот имеет высоту около 1 м и вес 25 кг. Система тяг с рукоятками и складной стул могут поддерживать 60 кг на рукоятке и 120 кг на сиденье. Максимальная скорость робота при автономной навигации 0,6 м/с. Напряжение батареи 14 В.
Рабочая среда
Робот спроектирован для работы внутри помещений в домашних условиях на ровном полу.
Типичные задания
Робот для оказания физической помощи должен выполнять следующие задания:
— поддержка пользователя при ходьбе, вставании или присаживании;
— проведение пользователя вокруг препятствий;
— обеспечение сиденья при необходимости (например, при одевании);
— напоминание пользователю о необходимости выполнить некоторые действия (например, о еде и питье, о физических упражнениях, о встрече);
— подъехать к пользователю по его вызову или отъехать от пользователя по его команде.
Степень автономности
При выполнении команд «вызов» или «отъезд» робот работает автономно. Получив команду, он перемещается между комнатами и обходит препятствия, чтобы подъехать к пользователю или отъехать от него без вмешательства человека. Когда пользователь держится за рукоятки, робот работает в полуавтономном режиме.
Определение подтипа робота
Робот может работать автономно. Он классифицирован как робот незакрепляемого типа с высокой степенью риска (тип 2.4 по ГОСТ Р 60.2.2.1-2016, 6.1.2.2.2).
7.6.2 Оценка риска
7.6.2.1 Определение ограничений робота по персональному уходу
Роботом должен управлять непрофессионал в домашних условиях, выполняя перечисленные выше задания. К домашним условиям относится ровная поверхность (твердое покрытие или ковер). Во время итеративного процесса общей оценки риска было решено исключить другие опасности и сделать процесс предварительной оценки риска и снижения риска более легким.
Условия использования: отсутствие ступеней, а наклонные поверхности должны иметь угол наклона менее 5°.
Небольшие объекты (менее 26 см в высоту и 7 см в ширину) должны быть удалены из помещения, т.к. они слишком малы для обнаружения датчиками робота.
Стеклянные окна или двери, примыкающие к поверхности пола, должны быть закрыты каким-либо материалом на нижние 20 см, чтобы обеспечить их различимость оптическими датчиками.
Управлять роботом должны только взрослые люди, способные понимать исходящие от робота опасности. Если в доме живут маленькие дети, то робот должен работать только под присмотром взрослого.
Пользователь должен быть способен ходить с помощью традиционных ходунков. Вес пользователя не должен превышать 100 кг, а его рост должен быть от 150 см до 190 см.
Предсказуемое неправильное использование
Можно ожидать, что люди (особенно дети) могут ездить на роботе при его перемещении в полностью автономном режиме. Это может повредить робота так, что это повлияет на безопасность или приведет к серьезным травмам при падении пользователя. Данная опасность имеет номер 6 при оценке риска в 7.6.2.2.
Кроме того, можно ожидать, что стол-поднос будет использован для размещения на нем слишком тяжелых предметов. Это может повредить или дестабилизировать робота так, что это повлияет на безопасность или приведет к травмированию пользователя в случае падения данных предметов.
7.6.2.2 Идентификация исходной опасности и предварительная оценка риска
В таблице 18 представлены идентифицированные опасности, создаваемые активным роботом, помогающим при ходьбе. Данный перечень основан на ГОСТ Р 60.2.2.1-2016, приложение А, используемого в качестве контрольной таблицы, и обсуждения каждой опасности из данного приложения на предмет ее присутствия. Для краткости список ограничен восемью элементами, хотя возможно существуют и другие опасности. Кроме того, в таблице 18 показана предварительная оценка риска, происходящего от данных опасностей на основе графика риска на рисунке 3.
Таблица 18 — Оценка степени риска перед применением мер по снижению риска
|
Тип опасности |
Опасность и опасное событие |
Потенциальное последствие |
Предварительная оценка риска: S: Серьезность вреда F: Частота воздействия O: Вероятность возникновения A: Возможность избежать R: Индекс риска |
Оценка степени риска |
Структурный элемент ГОСТ Р 60.2.2.1-2016 |
|
1 Меха- ническая |
Отказ тормозов и робот отъезжает из-за потери питания в то время, когда пользователь одевается |
Падение пользователя |
S2: Пользователь может сломать кость F2: Во время режима одевания робот обеспечивает постоянную поддержку пользователя O2: Отказ питания случается не часто, т.к. робот автоматически подъезжает к док-станции для подзарядки A2: Пользователь не может среагировать, чтобы поддержать устойчивость R: 5 |
Неприемлемая, т.к. серьезность и вероятность причинения вреда высоки, но существуют решения данной проблемы |
5.3.3 |
|
2 Меха- ническая |
В то время, когда пользователь держит рукоятки тяг, его пальцы оказываются зажаты между роботов и дверным косяком или стеной |
Пальцы пользова- теля могут быть зажаты, нанося травму |
S1: На пальцах пользователя могут образоваться гематомы (переломов нет из-за низкой скорости и малой массы) F1: Может произойти неожиданно O2: Способность пользователя к управлению может быть низкой A2: Пользователь реагирует медленно R: 1 |
Приемлемая в принципе, но отмечена для последующего снижения риска, т.к. небольшое изменение конструкции рукояток может решить данную проблему |
5.10.8 |
|
3 Меха- ническая |
Робот переезжает через ноги пользова- теля, т.к. не может обнаружить положение ног |
Травма ног |
S2: У пользователя могут быть гематомы или даже переломы F2: В данном рабочем режиме пользователь всегда приближен к роботу O2: Возможно иногда имеет место при использовании стандартного датчика A2: Пользователь двигается медленно R: 5 |
Неприемлемая, т.к. серьезность и вероятность причинения вреда высоки, но существуют решения данной проблемы |
5.10.8 |
|
4 Меха- ническая |
Пользователь хочет остановить робота, размыкая контакты датчиков на рукоятке, но робот продолжает движение |
Пользова- тель может упасть из-за потери поддержки, или робот может переехать через пользова- теля |
S2: Пользователь может получить серьезные переломы F2: Пользователь имеет постоянный контакт с рукоятками для управления роботом O1: Вряд ли может случиться A2: Если рукоятка не реагирует, то пользователь не имеет возможности уклониться R: 4 |
Неприемлемая, т.к. серьезность и вероятность причинения вреда высоки, но существуют решения данной проблемы |
Сопоставимо с 5.10.7, но в данном случае для робота для оказания физической помощи |
|
5 Меха- ническая |
Робот не обнаруживает лестничного спуска и падает вниз при автономном перемещении к пользователю |
Робот ударяет кого-либо, находя- щегося внизу лестницы |
S2: Могут быть нанесены серьезные травмы, если робот кого-нибудь ударит F1: Нахождение человека внизу лестницы при падении с нее робота весьма маловероятно O3: Нет средств для обнаружения лестницы A2: Падение случается неожиданно, а лестницы в домах обычно недостаточно широки, чтобы его избежать R: 4 |
Неприемлемая, т.к. серьезность и вероятность причинения вреда высоки, но существуют решения данной проблемы |
5.10.3 |
|
6 Меха- ническая |
Перемещение робота с сидящим на нем пользова- телем |
Начиная от травмиро- вания ступней из-за царапания по полу или касания колес и до серьезного защемления или падения |
S2: Возможны серьезные переломы F2: Часто можно ожидать неправильного поведения пользователя O3: Если человек сидит на роботе, то возможно его падение или травмирование A2: Падение происходит неожиданно R: 6 |
Неприемлемая, т.к. серьезность и вероятность причинения вреда высоки, но существуют решения данной проблемы |
5.10.3 |
|
7 Электри- ческая |
Наполненные жидкостью чашки соскальзы- вают с подноса, и жидкость проливается на робота или пользователя |
Электри- ческий шок, короткое замыкание |
S2: Во влажной среде 48 В создают опасность шока F2: Пользователь находится в постоянном контакте с роботом O1: Чашки падают редко. Даже при их падении жидкость редко попадает на токоведущие части A2: У пользователя нет шансов уклониться от токоведущих частей R: 4 |
Неприемлемая |
5.3.1 |
|
8 Меха- ническая |
Неожиданно появившийся перед роботом человек не обнаружен (вовремя), что означает, что робот не затормозит |
Робот может ударить других людей |
S1: Низкая скорость, нет переломов F2: Робот постоянно работает вблизи людей O2: Датчики иногда не могут обнаружить человека A1: Пользователь или посторонние люди могут вручную остановить робота R: 1 |
Приемлемая, т.к. произведение серьезности и вероятности причинения вреда мало, и пользователь может остановить робота вручную |
5.10.8 |
7.6.2.3 Меры по снижению риска
При общей оценке риска идентифицируют опасности, приводящие к недопустимому риску, который должен быть снижен. В таблице 19 показаны две выбранные опасности, к которым применяют меры для снижения риска.
Таблица 19 — Меры по снижению риска для двух выбранных опасностей
|
Опасность и опасное событие |
Потенциальное последствие |
Меры конструирования со встроенной безопасностью |
Меры предосторожности или дополнительные защитные меры |
Информация по использованию |
|
3 Робот переезжает через ноги пользователя, т.к. не может обнаружить положение ног |
Травма ног |
— |
Система датчиков безопасности для обнаружения ног заранее или система бамперов для остановки робота при соприкосновении с ногой пользователя |
— |
|
6 Перемещение робота с сидящим на нем пользователем |
Начиная от травмирования ступней из-за царапания по полу или касания колес и до серьезного защемления или падения |
— |
Разработка системы безопасности, предотвращающей использование робота, если на нем кто-то сидит (т.е. торможение при обнаружении сидящего на роботе человека) |
В руководстве пользователя должно быть приведено предупреждение для пользователей о потенциальных рисках |
7.6.2.4 Окончательная оценка риска и остаточный риск
После применения всех мер по снижению риска следует произвести окончательную оценку риска, чтобы определить было ли снижение риска успешным и установить остаточный риск. В таблице 20 показаны только опасности, выбранные в 7.6.2.3.
Таблица 20 — Окончательная оценка риска
|
Тип опасности |
Опасность и опасное событие |
Потенциальное последствие |
Предварительная оценка риска: S: Серьезность вреда F: Частота воздействия O: Вероятность возникновения A: Возможность избежать R: Индекс риска |
Оценка степени риска |
Структурный элемент ГОСТ Р 60.2.2.1-2016 |
|
3 Меха- ническая |
Робот переезжает через ноги пользователя, т.к. не может обнаружить положение ног |
Травма ног |
S2: У пользователя могут быть гематомы или даже переломы F2: В данном рабочем режиме пользователь всегда приближен к роботу O1: Маловероятно благодаря мерам безопасности A2: Пользователь двигается медленно R: 4 |
Приемлемая, если функция безопасности имеет УЭЗт |
5.10.8 |
|
6 Меха- ническая |
Перемещение робота с сидящим на нем пользова- телем |
Потенциальные риски в диапа- зоне от травми- рования ступней из-за царапания по полу или касания колес и до серьезного защемления или падения устранены |
S2: Возможны серьезные переломы F2: Часто можно ожидать неправильного поведения пользователя O1: Робот не будет двигаться, если на нем кто-то сидит A2: Падение происходит неожиданно R: 4 |
Приемлемая, если функция безопасности имеет УЭЗт |
5.10.3 |
Окончательная оценка риска показывает, что риски являются приемлемыми, если система безопасности (как датчики, так и система управления) достигает УЭЗт.
7.6.3 Система управления, связанная с безопасностью
В процессе снижения риска применены защитные меры, являющиеся частью связанной с безопасностью системы управления. Для всех случаев необходимо определить ситуацию, при которой роботу не разрешено перемещаться. Кроме того, у пользователя есть кнопки для предотвращения столкновения и аварийной остановки. В ГОСТ Р 60.2.2.1 для всех функций безопасности приведено рекомендованное значение УЭЗ — d, в соответствии с ГОСТ Р 60.2.2.1-2016, таблица 1, тип 2.4. В таблице 21 требуемые характеристики системы управления подтверждены в соответствии с графиком риска из ГОСТ ISO 13849-1.
Таблица 21 — Функция безопасности и заданный УЭЗ
|
Функция безопасности |
Рекомендованный УЭЗ в соответствии с ГОСТ Р 60.2.2.1-2016, таблица 1 |
УЭЗ в соответствии с ГОСТ ISO 13849-1: S: Серьезность травмы F: Частота и/или длительность опасности P: Вероятность избегания опасности или ограничения вреда |
Структурный элемент ГОСТ Р 60.2.2.1-2016 |
|
I Аварийная остановка |
d |
S2: Столкновения могут причинить серьезную травму F1: Аварийную остановку используют редко P2: Если авария уже произошла, то едва ли существует возможность ее избежать УЭЗт: d |
6.2.2.2 |
|
III Предотвращение опасных столкновений |
d |
S2: Столкновения могут причинить серьезную травму F1: Очувствление и планирование маршрута обычно предотвращают столкновения, поэтому меры безопасности активируются редко P2: Пользователь реагирует медленно УЭЗт: d |
6.5.2.1 и 6.5.2.2 |
|
IV Обнаружение сложенного положения сиденья пользователя |
— |
S2: Падение с робота может причинить серьезную травму F1: Пользователь перестает пытаться проехать на роботе после того, как он замечает, что движение заблокировано P2: Падение происходит неожиданно УЭЗт: d |
— |
Как аварийная остановка, так и защитная остановка могут быть реализованы с помощью отключения питания от двигателей (остановка категории 0 по ГОСТ IEC 60204-1). Защитная остановка может быть отнесена к категории 2 (по ГОСТ IEC 60204-1), если риски надежно контролируются. Однако, обе функции могут обрабатываться раздельно в системе управления, т.к. после защитной остановки разрешен автоматический перезапуск, если препятствия больше не видно. Для аварийной остановки допустим только ручной перезапуск (см. ГОСТ Р 60.2.2.1-2016, 6.2.2.2). Обнаружение сложенного положения сиденья пользователя может быть реализовано с помощью использования блокировочного устройства в соответствии с [2], чтобы подтвердить прямое расположение сиденья. Для предотвращения перемещения во время зарядки, на крышке зарядного штепселя робота может быть установлен предохранительный выключатель, который отключает питание двигателей колес при снятой крышке.
Приложение ДА
(справочное)
Сведения о соответствии ссылочных национальных стандартов международным стандартам, использованным в качестве ссылочных в примененном международном стандарте
Таблица ДА.1
|
Обозначение ссылочного национального стандарта |
Степень соответствия |
Обозначение и наименование ссылочного международного стандарта |
|
ГОСТ Р 60.2.2.1-2016/ ИСО 13482:2014 |
IDT |
ISO 13482:2014 «Роботы и робототехнические устройства. Требования безопасности для роботов по персональному уходу» |
|
Примечание — В настоящей таблице использовано следующее условное обозначение степени соответствия стандарта: — IDT — идентичный стандарт. |
Библиография
|
[1] |
ISO/TR 14121-2:2012 |
Безопасность машин. Оценка риска. Практическое руководство и примеры методов (Safety of machinery — Risk assessment — Part 2: Practical guidance and examples of methods) |
|
[2] |
ИСО 14119:2013 |
Безопасность машин. Блокировочные устройства для ограждений. Принципы конструкции и выбора (Safety of machinery — Interlocking devices associated with guards — Principles for design and selection |
|
УДК 621.865:8:007.52:006.86:006.354 |
ОКС 25.040.30 |
|
Ключевые слова: роботы, робототехнические устройства, сервисные роботы, роботы по персональному уходу, руководство по применению |
О книге «Эксплуатация мобильных робототехнических комплексов. . Учебник.»
Рассмотрена эксплуатация мобильных робототехнических комплексов. Представлены основы цифровых систем управления, описание способов управления роботами, устройство приводов в исполнительных механизмах, сведения по настройке, наладке, безопасной эксплуатации, ремонту и утилизации мобильной робототехники. Проведен обзор основных типов датчиков, используемых в системах управления, освещены основные проблемы, возникающие при разработке и испытаниях роботов, показаны возможности применения на данных этапах математического и полунатурного моделирования. Соответствует ФГОС СПО последнего поколения. Для студентов среднего профессионального образования, обучающихся по специальности «Мехатроника и мобильная робототехника (по отраслям)».
Произведение относится к жанру Электроника. Оно было опубликовано в 2022 году издательством Кнорус. На нашем сайте можно скачать книгу «Эксплуатация мобильных робототехнических комплексов. . Учебник.» в формате fb2, rtf, epub, pdf, txt или читать онлайн. Здесь так же можно перед прочтением обратиться к отзывам читателей, уже знакомых с книгой, и узнать их мнение. В интернет-магазине нашего партнера вы можете купить и прочитать книгу в бумажном варианте.